Kailynn Mannella, Giulia A Albanese, Valentina Massone, Kevin E Power, Duane C Button, Jonathan P Farthing, Shawn M Beaudette, Dave S Ditor, Craig D Tokuno, Jacopo Zenzeri, Michael W R Holmes
{"title":"Wristful thinking: exploring the effects of robotic rehabilitation and cross-education for persons with multiple sclerosis.","authors":"Kailynn Mannella, Giulia A Albanese, Valentina Massone, Kevin E Power, Duane C Button, Jonathan P Farthing, Shawn M Beaudette, Dave S Ditor, Craig D Tokuno, Jacopo Zenzeri, Michael W R Holmes","doi":"10.1186/s12984-025-01684-y","DOIUrl":null,"url":null,"abstract":"<p><p>The goal of this work was to develop an adaptive rehabilitation technique using a haptic wrist robot that would induce cross-education to an untrained limb. Fourteen individuals with Multiple Sclerosis (MS) and eight non-affected adults completed an eight-week intervention. MS participants were placed into two groups, training their more affected limb (direct training), and training their less affected limb (indirect training). The purpose of the intervention was to improve wrist and grip strength (measured via maximal grip and isometric wrist strength) and motor control (measured via robotic assessments). Participants trained with the robotic device three times per week for eight consecutive weeks. Training consisted of eccentric contractions as the participant resisted a force elicited from the robotic device as it moved in flexion, extension, and radial-ulnar deviation. The MS group reported significant increases in wrist strength. The indirect training group significantly improved in flexion, extension, radial and ulnar deviation in the trained limb, and flexion and radial deviation in the untrained limb. The direct training group showed improvements in extension and ulnar deviation in both limbs. The control group improved in radial and ulnar deviation, with radial deviation improving in the untrained limb. Grip force remained unchanged for all groups. MS participants significantly decreased tracking and figural error post-intervention suggesting evidence that motor control adaptations occurred following an adaptive and resistive robotic intervention of the upper limb. Results of this work provide evidence that eight-week robotic rehabilitation can elicit cross-education effects to the untrained limb.</p>","PeriodicalId":16384,"journal":{"name":"Journal of NeuroEngineering and Rehabilitation","volume":"22 1","pages":"152"},"PeriodicalIF":5.2000,"publicationDate":"2025-07-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12229000/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of NeuroEngineering and Rehabilitation","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1186/s12984-025-01684-y","RegionNum":2,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
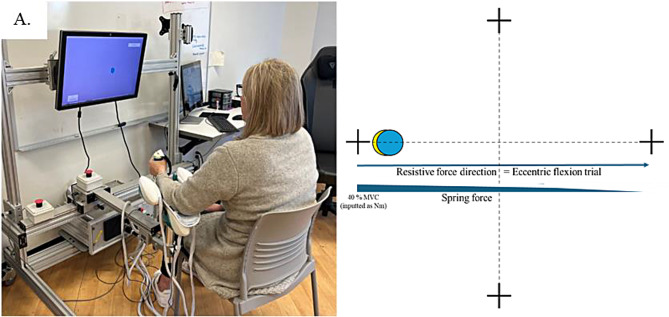
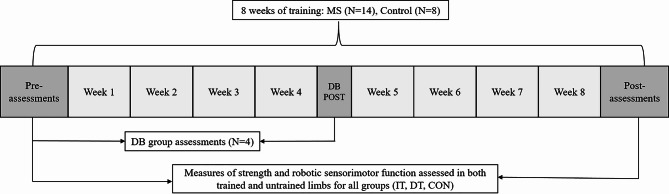
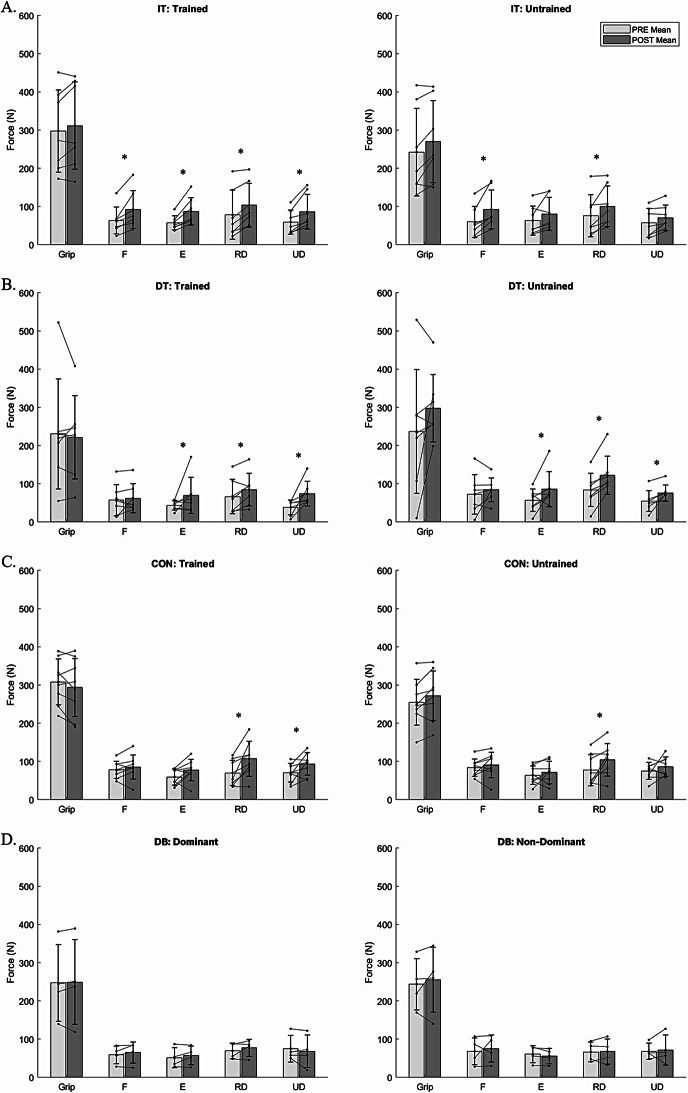
The goal of this work was to develop an adaptive rehabilitation technique using a haptic wrist robot that would induce cross-education to an untrained limb. Fourteen individuals with Multiple Sclerosis (MS) and eight non-affected adults completed an eight-week intervention. MS participants were placed into two groups, training their more affected limb (direct training), and training their less affected limb (indirect training). The purpose of the intervention was to improve wrist and grip strength (measured via maximal grip and isometric wrist strength) and motor control (measured via robotic assessments). Participants trained with the robotic device three times per week for eight consecutive weeks. Training consisted of eccentric contractions as the participant resisted a force elicited from the robotic device as it moved in flexion, extension, and radial-ulnar deviation. The MS group reported significant increases in wrist strength. The indirect training group significantly improved in flexion, extension, radial and ulnar deviation in the trained limb, and flexion and radial deviation in the untrained limb. The direct training group showed improvements in extension and ulnar deviation in both limbs. The control group improved in radial and ulnar deviation, with radial deviation improving in the untrained limb. Grip force remained unchanged for all groups. MS participants significantly decreased tracking and figural error post-intervention suggesting evidence that motor control adaptations occurred following an adaptive and resistive robotic intervention of the upper limb. Results of this work provide evidence that eight-week robotic rehabilitation can elicit cross-education effects to the untrained limb.
期刊介绍:
Journal of NeuroEngineering and Rehabilitation considers manuscripts on all aspects of research that result from cross-fertilization of the fields of neuroscience, biomedical engineering, and physical medicine & rehabilitation.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


