Quantitative comparison of cable models through dimensional analysis
IF 4.5
1区 工程技术
Q1 ENGINEERING, MECHANICAL
引用次数: 0
Abstract
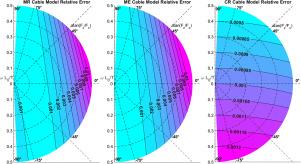
The use of cables enables the design of Cable-Driven Parallel Robots (CDPRs) of various sizes and payloads. However, this scalability does not always extend to their mechanical models: different sizes and payloads generally require different models. Unlike standard robots, CDPR cables are prone to sag and stretch. These phenomena are well documented, and several models have been proposed to describe them. Despite this, there is no established method for selecting the most appropriate model for a given application. This article addresses this issue by proposing a quantitative comparison using dimensional analysis applied to four common cable models: Massless Rigid, Massless Elastic, Catenary, and Catenary Elastic. The method compares cable-end positions under identical loading conditions for each model. A simulation study compares computed and predicted data, showing that the relative error of a model can be predicted with this approach. A large-scale CDPR is then used for experimental validation. The proposed methodology and results suggest that dimensional analysis is a valid tool for selecting the appropriate cable model.
通过量纲分析对缆索模型进行定量比较
电缆的使用使各种尺寸和有效载荷的电缆驱动并联机器人(cdpr)的设计成为可能。然而,这种可扩展性并不总是扩展到它们的机械模型:不同的大小和有效载荷通常需要不同的模型。与标准机器人不同,CDPR电缆容易下垂和拉伸。这些现象都有很好的文献记载,并提出了几种模型来描述它们。尽管如此,对于为给定的应用程序选择最合适的模型还没有确定的方法。本文通过对四种常见电缆模型(无质量刚性、无质量弹性、悬链线和悬链线弹性)进行量纲分析进行定量比较,解决了这个问题。该方法比较了各模型在相同荷载条件下的索端位置。仿真研究比较了计算数据和预测数据,表明该方法可以预测模型的相对误差。然后使用大规模CDPR进行实验验证。所提出的方法和结果表明,量纲分析是选择合适的电缆模型的有效工具。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Mechanism and Machine Theory
工程技术-工程:机械
CiteScore
9.90
自引率
23.10%
发文量
450
审稿时长
20 days
期刊介绍:
Mechanism and Machine Theory provides a medium of communication between engineers and scientists engaged in research and development within the fields of knowledge embraced by IFToMM, the International Federation for the Promotion of Mechanism and Machine Science, therefore affiliated with IFToMM as its official research journal.
The main topics are:
Design Theory and Methodology;
Haptics and Human-Machine-Interfaces;
Robotics, Mechatronics and Micro-Machines;
Mechanisms, Mechanical Transmissions and Machines;
Kinematics, Dynamics, and Control of Mechanical Systems;
Applications to Bioengineering and Molecular Chemistry
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


