Nicole E Stafford, Eddie B Gonzalez, Daniel P Ferris
{"title":"Evaluation of a Portable Bionic Ankle Prosthesis Under Direct Continuous Electromyography Control for Quiet Standing Tasks.","authors":"Nicole E Stafford, Eddie B Gonzalez, Daniel P Ferris","doi":"10.1097/JPO.0000000000000533","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Postural control and balance are necessary for activities of daily living. Passive prostheses that reduce ankle dorsiflexion/plantarflexion control can require different balance strategies compared with able-bodied individuals. Powered prostheses may restore ankle joint control and improve balance compared with passive prostheses. Muscle activity as the prosthetic control input leverages the human neural control system to directly modulate prosthetic dynamics. This study evaluates continuous myoelectric control during quiet standing tasks with an untethered electromechanically actuated bionic ankle prosthesis.</p><p><strong>Methods: </strong>Six individuals with transtibial amputation conducted four 30-second trials of quiet standing for four standing conditions (Eyes Open, Eyes Closed, Eyes Open Foam, and Eyes Closed Foam) using their passive, prescribed prosthesis and a bionic prosthesis under two types of myoelectric control. One strategy solely used residual gastrocnemius muscle as input (GAS), whereas the second used the gastrocnemius and tibialis anterior (GAS+TA). Postural stability was evaluated via Total Excursion, Body Sway Area, and Prediction Ellipse Area center of pressure measures from force plates. We hypothesized that the bionic prosthesis would improve balance control compared with the passive prosthesis. We also quantified weight bearing of prosthetic and sound limbs. Participants completed a preference/sense of stability survey between the prostheses.</p><p><strong>Results: </strong>We found no significant differences in individual prostheses and controllers across our four standing conditions, or between prostheses and controllers for a single standing condition for all center of pressure measures. Participants tended to increase weight on their sound limb from Eyes Open to Eyes Closed Foam conditions. Participants trended toward preferring myoelectric control, but there were no significant differences among prostheses.</p><p><strong>Conclusions: </strong>Compared with a passive transtibial prosthesis, a myoelectrically controlled bionic prosthesis did not alter standing balance performance.</p><p><strong>Clinical relevance: </strong>Our study did not demonstrate differences between the myoelectrically controlled bionic transtibial prosthesis and the prescribed passive prosthesis in balance control. It is possible that other metrics would be necessary to increase sensitivity in comparisons.</p>","PeriodicalId":53702,"journal":{"name":"Journal of Prosthetics and Orthotics","volume":"37 3","pages":"153-163"},"PeriodicalIF":0.6000,"publicationDate":"2025-07-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12188804/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Prosthetics and Orthotics","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1097/JPO.0000000000000533","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/8/26 0:00:00","PubModel":"Epub","JCR":"Q4","JCRName":"ORTHOPEDICS","Score":null,"Total":0}
引用次数: 0
Abstract
Introduction: Postural control and balance are necessary for activities of daily living. Passive prostheses that reduce ankle dorsiflexion/plantarflexion control can require different balance strategies compared with able-bodied individuals. Powered prostheses may restore ankle joint control and improve balance compared with passive prostheses. Muscle activity as the prosthetic control input leverages the human neural control system to directly modulate prosthetic dynamics. This study evaluates continuous myoelectric control during quiet standing tasks with an untethered electromechanically actuated bionic ankle prosthesis.
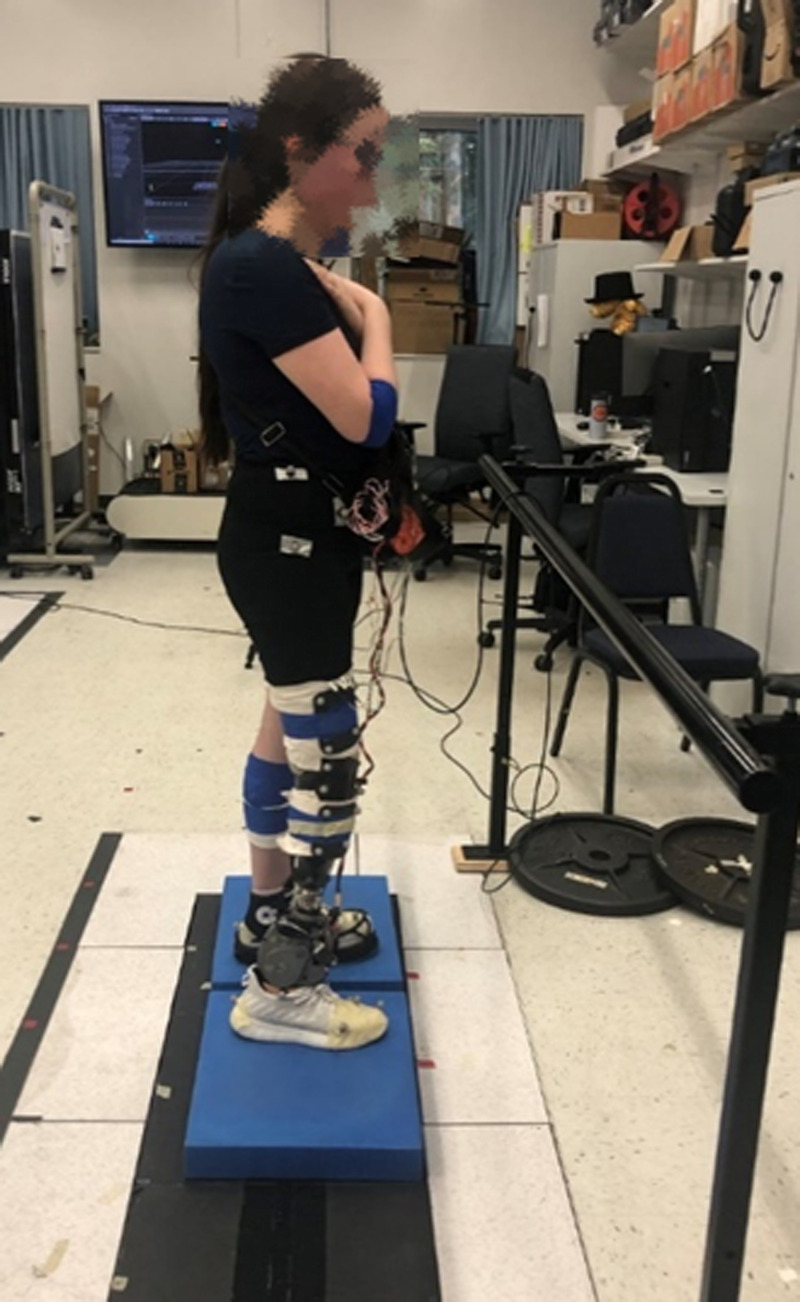
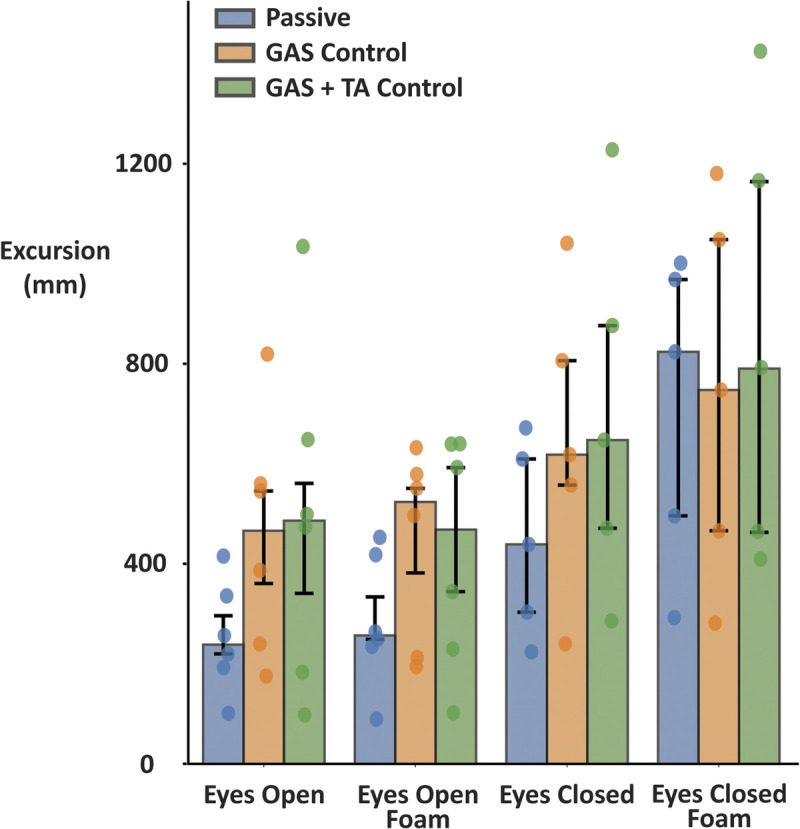
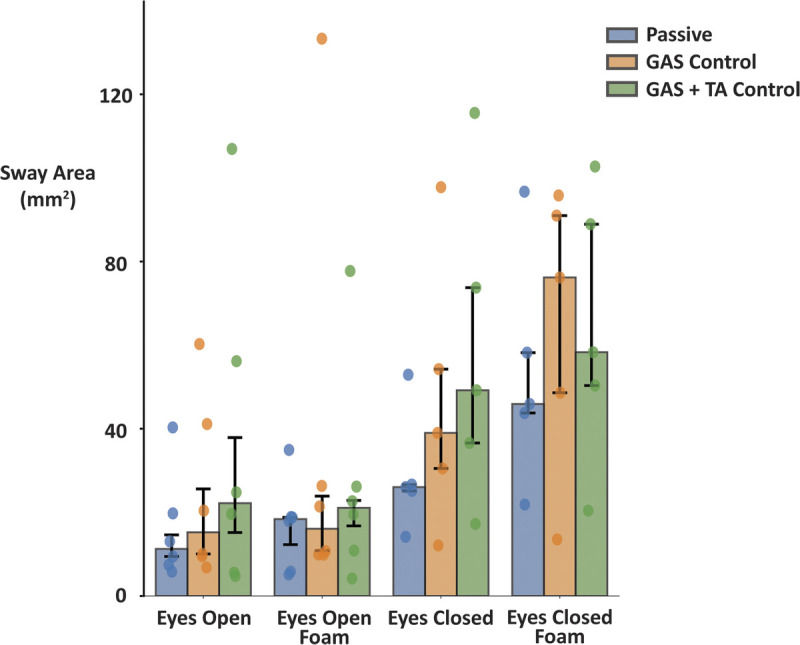
Methods: Six individuals with transtibial amputation conducted four 30-second trials of quiet standing for four standing conditions (Eyes Open, Eyes Closed, Eyes Open Foam, and Eyes Closed Foam) using their passive, prescribed prosthesis and a bionic prosthesis under two types of myoelectric control. One strategy solely used residual gastrocnemius muscle as input (GAS), whereas the second used the gastrocnemius and tibialis anterior (GAS+TA). Postural stability was evaluated via Total Excursion, Body Sway Area, and Prediction Ellipse Area center of pressure measures from force plates. We hypothesized that the bionic prosthesis would improve balance control compared with the passive prosthesis. We also quantified weight bearing of prosthetic and sound limbs. Participants completed a preference/sense of stability survey between the prostheses.
Results: We found no significant differences in individual prostheses and controllers across our four standing conditions, or between prostheses and controllers for a single standing condition for all center of pressure measures. Participants tended to increase weight on their sound limb from Eyes Open to Eyes Closed Foam conditions. Participants trended toward preferring myoelectric control, but there were no significant differences among prostheses.
Conclusions: Compared with a passive transtibial prosthesis, a myoelectrically controlled bionic prosthesis did not alter standing balance performance.
Clinical relevance: Our study did not demonstrate differences between the myoelectrically controlled bionic transtibial prosthesis and the prescribed passive prosthesis in balance control. It is possible that other metrics would be necessary to increase sensitivity in comparisons.
期刊介绍:
Published quarterly by the AAOP, JPO: Journal of Prosthetics and Orthotics provides information on new devices, fitting and fabrication techniques, and patient management experiences. The focus is on prosthetics and orthotics, with timely reports from related fields such as orthopaedic research, occupational therapy, physical therapy, orthopaedic surgery, amputation surgery, physical medicine, biomedical engineering, psychology, ethics, and gait analysis. Each issue contains research-based articles reviewed and approved by a highly qualified editorial board and an Academy self-study quiz offering two PCE''s.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


