Pietro Leoncini, Francesco Marzola, Matteo Pescio, Maura Casadio, Alberto Arezzo, Giulio Dagnino
{"title":"A reproducible framework for synthetic data generation and instance segmentation in robotic suturing.","authors":"Pietro Leoncini, Francesco Marzola, Matteo Pescio, Maura Casadio, Alberto Arezzo, Giulio Dagnino","doi":"10.1007/s11548-025-03460-8","DOIUrl":null,"url":null,"abstract":"<p><strong>Purpose: </strong>Automating suturing in robotic-assisted surgery offers significant benefits including enhanced precision, reduced operative time, and alleviated surgeon fatigue. Achieving this requires robust computer vision (CV) models. Still, their development is hindered by the scarcity of task-specific datasets and the complexity of acquiring and annotating real surgical data. This work addresses these challenges using a sim-to-real approach to create synthetic datasets and a data-driven methodology for model training and evaluation.</p><p><strong>Methods: </strong>Existing 3D models of Da Vinci tools were modified and new models-needle and tissue cuts-were created to account for diverse data scenarios, enabling the generation of three synthetic datasets with increasing realism using Unity and the Perception package. These datasets were then employed to train several YOLOv8-m models for object detection to evaluate the generalizability of synthetic-trained models in real scenarios and the impact of dataset realism on model performance. Additionally, a real-time instance segmentation model was developed through a hybrid training strategy combining synthetic and a minimal set of real images.</p><p><strong>Results: </strong>Synthetic-trained models showed improved performance on real test sets as training dataset realism increased, but realism levels remained insufficient for complete generalization. Instead, the hybrid approach significantly increased performance in real scenarios. Indeed, the hybrid instance segmentation model exhibited real-time capabilities and robust accuracy, achieving the best Dice coefficient (0.92) with minimal dependence on real training data (30-50 images).</p><p><strong>Conclusions: </strong>This study demonstrates the potential of sim-to-real synthetic datasets to advance robotic suturing automation through a simple and reproducible framework. By sharing 3D models, Unity environments and annotated datasets, this work provides resources for creating additional images, expanding datasets, and enabling fine-tuning or semi-supervised learning. By facilitating further exploration, this work lays a foundation for advancing suturing automation and addressing task-specific dataset scarcity.</p>","PeriodicalId":51251,"journal":{"name":"International Journal of Computer Assisted Radiology and Surgery","volume":" ","pages":"1567-1576"},"PeriodicalIF":2.3000,"publicationDate":"2025-08-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12350469/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Computer Assisted Radiology and Surgery","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s11548-025-03460-8","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/6/24 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
Purpose: Automating suturing in robotic-assisted surgery offers significant benefits including enhanced precision, reduced operative time, and alleviated surgeon fatigue. Achieving this requires robust computer vision (CV) models. Still, their development is hindered by the scarcity of task-specific datasets and the complexity of acquiring and annotating real surgical data. This work addresses these challenges using a sim-to-real approach to create synthetic datasets and a data-driven methodology for model training and evaluation.
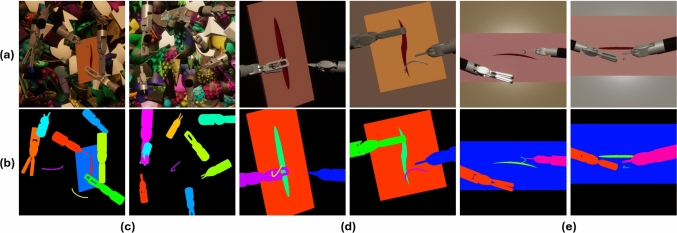
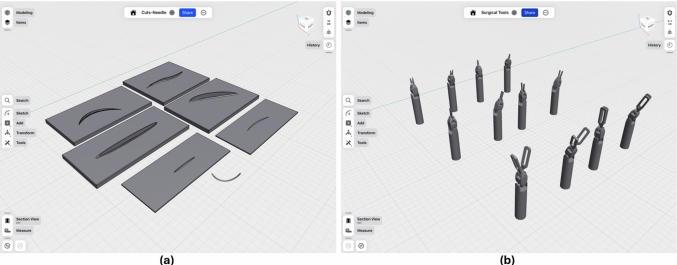
Methods: Existing 3D models of Da Vinci tools were modified and new models-needle and tissue cuts-were created to account for diverse data scenarios, enabling the generation of three synthetic datasets with increasing realism using Unity and the Perception package. These datasets were then employed to train several YOLOv8-m models for object detection to evaluate the generalizability of synthetic-trained models in real scenarios and the impact of dataset realism on model performance. Additionally, a real-time instance segmentation model was developed through a hybrid training strategy combining synthetic and a minimal set of real images.
Results: Synthetic-trained models showed improved performance on real test sets as training dataset realism increased, but realism levels remained insufficient for complete generalization. Instead, the hybrid approach significantly increased performance in real scenarios. Indeed, the hybrid instance segmentation model exhibited real-time capabilities and robust accuracy, achieving the best Dice coefficient (0.92) with minimal dependence on real training data (30-50 images).
Conclusions: This study demonstrates the potential of sim-to-real synthetic datasets to advance robotic suturing automation through a simple and reproducible framework. By sharing 3D models, Unity environments and annotated datasets, this work provides resources for creating additional images, expanding datasets, and enabling fine-tuning or semi-supervised learning. By facilitating further exploration, this work lays a foundation for advancing suturing automation and addressing task-specific dataset scarcity.
期刊介绍:
The International Journal for Computer Assisted Radiology and Surgery (IJCARS) is a peer-reviewed journal that provides a platform for closing the gap between medical and technical disciplines, and encourages interdisciplinary research and development activities in an international environment.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


