{"title":"Percutaneous endoscopic lumbar partial laminectomy assisted by a new miniature parallel surgical robot system: a trial on a cadaveric specimen.","authors":"Nan Su, Jiashen Shao, Gang Zhu, Yu Wang","doi":"10.20452/wiitm.2025.17935","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Robot‑assisted surgery is becoming increasingly popular and its application is expanding to various spinal surgical procedures, including endoscopic spinal surgery.</p><p><strong>Aim: </strong>The aim of this study was to describe a novel small parallel orthopedic surgical robot and evaluate its feasibility in assisting surgeons during percutaneous lumbar laminectomy on cadaveric specimens.</p><p><strong>Materials and methods: </strong>The authors of the study developed a new orthopedic surgical navigation system (R‑Pharos, Rossum Robot Co., Ltd, Beijing, China), consisting of a navigation cart and a hybrid serial‑parallel bedside robotic arm. The system is equipped with interactive software for selecting and planning the percutaneous lumbar laminectomy target and path. A cadaveric specimen was selected for a right‑side partial laminectomy at L4. During the procedure, the surgeon used the robotic arm to guide the saw to the target lamina and perform the percutaneous resection. Postoperative cone beam computed tomography (CBCT) and endoscopic assessments were used to confirm the resection outcome.</p><p><strong>Results: </strong>After optimizing the precision of the small parallel orthopedic surgical robot to 1 mm, it was shown to meet the navigational requirements for percutaneous lumbar laminectomy. The surgeon utilized the interactive software to design the resection range and path for the right L4 lamina which was successfully resected, as confirmed by endoscopic observation. A postoperative CBCT scan revealed that the resection area precisely matched the preoperative design.</p><p><strong>Conclusions: </strong>This study demonstrated that the small parallel orthopedic surgical robot was capable of preoperatively planning the lamina resection area and could assist the surgeon in performing percutaneous lumbar laminectomy with high navigational precision.</p>","PeriodicalId":49361,"journal":{"name":"Videosurgery and Other Miniinvasive Techniques","volume":"20 1","pages":"99-105"},"PeriodicalIF":1.9000,"publicationDate":"2025-03-24","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12177342/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Videosurgery and Other Miniinvasive Techniques","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.20452/wiitm.2025.17935","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/4/9 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"SURGERY","Score":null,"Total":0}
引用次数: 0
Abstract
Introduction: Robot‑assisted surgery is becoming increasingly popular and its application is expanding to various spinal surgical procedures, including endoscopic spinal surgery.
Aim: The aim of this study was to describe a novel small parallel orthopedic surgical robot and evaluate its feasibility in assisting surgeons during percutaneous lumbar laminectomy on cadaveric specimens.
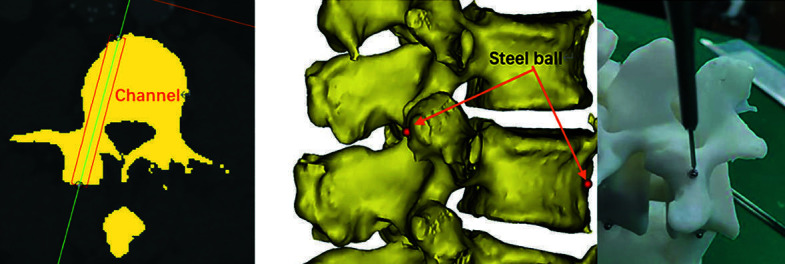
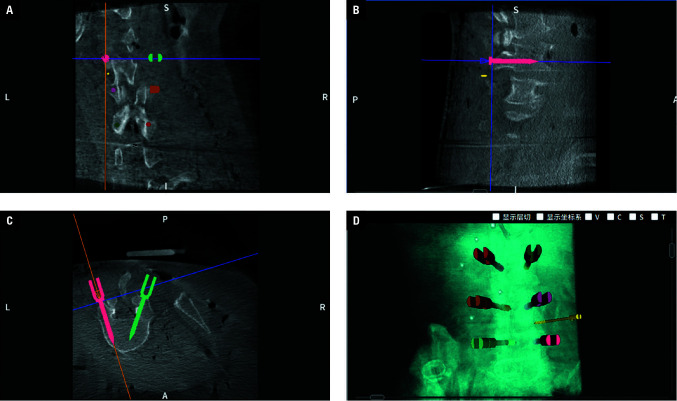
Materials and methods: The authors of the study developed a new orthopedic surgical navigation system (R‑Pharos, Rossum Robot Co., Ltd, Beijing, China), consisting of a navigation cart and a hybrid serial‑parallel bedside robotic arm. The system is equipped with interactive software for selecting and planning the percutaneous lumbar laminectomy target and path. A cadaveric specimen was selected for a right‑side partial laminectomy at L4. During the procedure, the surgeon used the robotic arm to guide the saw to the target lamina and perform the percutaneous resection. Postoperative cone beam computed tomography (CBCT) and endoscopic assessments were used to confirm the resection outcome.
Results: After optimizing the precision of the small parallel orthopedic surgical robot to 1 mm, it was shown to meet the navigational requirements for percutaneous lumbar laminectomy. The surgeon utilized the interactive software to design the resection range and path for the right L4 lamina which was successfully resected, as confirmed by endoscopic observation. A postoperative CBCT scan revealed that the resection area precisely matched the preoperative design.
Conclusions: This study demonstrated that the small parallel orthopedic surgical robot was capable of preoperatively planning the lamina resection area and could assist the surgeon in performing percutaneous lumbar laminectomy with high navigational precision.
期刊介绍:
Videosurgery and other miniinvasive techniques serves as a forum for exchange of multidisciplinary experiences in fields such as: surgery, gynaecology, urology, gastroenterology, neurosurgery, ENT surgery, cardiac surgery, anaesthesiology and radiology, as well as other branches of medicine dealing with miniinvasive techniques.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


