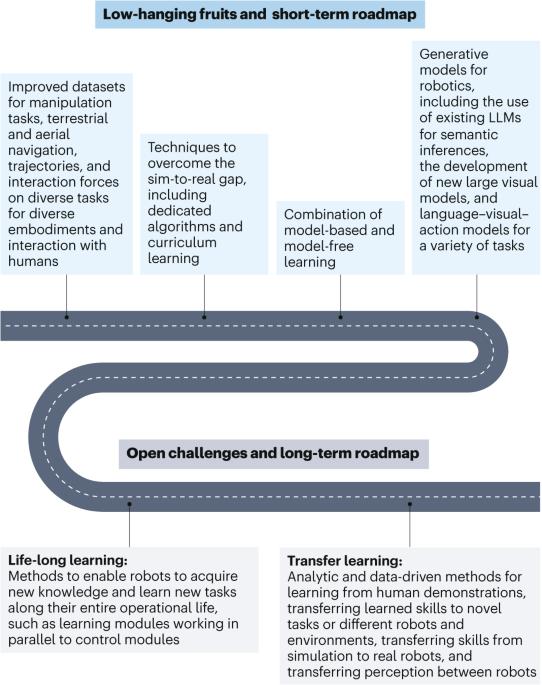
A roadmap for AI in robotics
IF 23.9
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
Abstract
There is growing excitement about the potential of leveraging artificial intelligence (AI) to tackle some of the outstanding barriers to the full deployment of robots in daily lives. However, action and sensing in the physical world pose greater and different challenges for AI than analysing data in isolation and it is important to reflect on which AI approaches are most likely to be successfully applied to robots. Questions to address, among others, are how AI models can be adapted to specific robot designs, tasks and environments. This Perspective offers an assessment of what AI has achieved for robotics since the 1990s and proposes a research roadmap with challenges and promises. These range from keeping up-to-date large datasets, representatives of a diversity of tasks that robots may have to perform, and of environments they may encounter, to designing AI algorithms tailored specifically to robotics problems but generic enough to apply to a wide range of applications and transfer easily to a variety of robotic platforms. For robots to collaborate effectively with humans, they must predict human behaviour without relying on bias-based profiling. Explainability and transparency in AI-driven robot control are essential for building trust, preventing misuse and attributing responsibility in accidents. We close with describing what are, in our view, primary long-term challenges, namely, designing robots capable of lifelong learning, and guaranteeing safe deployment and usage, as well as sustainable development. AI technologies are advancing rapidly, offering new solutions for autonomous robot operation in complex environments. Aude Billard et al. discuss the need to identify and adapt AI technologies for robotics, proposing a research roadmap to address key challenges and opportunities.

机器人领域的人工智能路线图
利用人工智能(AI)解决机器人在日常生活中全面部署的一些突出障碍的潜力越来越令人兴奋。然而,与孤立地分析数据相比,物理世界中的行动和感知对人工智能构成了更大、更不同的挑战,重要的是要反思哪些人工智能方法最有可能成功地应用于机器人。需要解决的问题包括,人工智能模型如何适应特定的机器人设计、任务和环境。本展望对人工智能自20世纪90年代以来在机器人领域取得的成就进行了评估,并提出了一个具有挑战和前景的研究路线图。这些范围从保持最新的大型数据集,机器人可能必须执行的各种任务的代表,以及它们可能遇到的环境,到设计专门针对机器人问题量身定制的人工智能算法,但足够通用,可以应用于广泛的应用,并容易转移到各种机器人平台。为了让机器人有效地与人类合作,它们必须在不依赖基于偏见的分析的情况下预测人类的行为。人工智能驱动的机器人控制的可解释性和透明度对于建立信任、防止滥用和追究事故责任至关重要。最后,我们描述了在我们看来主要的长期挑战,即设计能够终身学习的机器人,并保证安全部署和使用,以及可持续发展。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Nature Machine Intelligence
Multiple-
CiteScore
36.90
自引率
2.10%
发文量
127
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


