Duncan T Tulimieri, GilHwan Kim, Joanna E Hoh, Fabrizio Sergi, Jennifer A Semrau
{"title":"A pilot study for self-guided, active robotic training of proprioception of the upper limb in chronic stroke.","authors":"Duncan T Tulimieri, GilHwan Kim, Joanna E Hoh, Fabrizio Sergi, Jennifer A Semrau","doi":"10.1186/s12984-025-01660-6","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>Proprioceptive impairments of the upper limb are common after stroke. These impairments are not typically addressed during assessment or rehabilitation. Currently, most robotic paradigms for training of the upper limb have focused solely on improving motor function or have targeted proprioception in individuals with combined use of visual feedback. Our goal was to design a training paradigm that directly targets proprioception of the upper limb, while minimizing reliance on other sensory information to improve sensorimotor function after stroke.</p><p><strong>Methods: </strong>In this pilot study, 5 individuals with stroke and 5 age-matched controls were tested on a single-day proprioceptive training paradigm. Here, participants used a joystick with their less-affected arm to send commands to a KINARM exoskeleton that would passively move their more-affected arm. To complete the passive reaching task, participants relied only on proprioceptive feedback from the more-affected arm and were only given knowledge of results information after each trial. Sensorimotor function of the upper limb was measured pre- and post-training via robotic measures of motor function [Visually Guided Reaching (VGR)] and position sense [Arm Position Matching (APM)]. Sensorimotor function was quantified as a Task Score, which incorporated multiple task-relevant parameters for both VGR and APM. Changes in sensorimotor performance due to training were calculated as the pre- to post-training difference for VGR and APM within the control and stroke groups.</p><p><strong>Results: </strong>We found significant improvements from pre-training to post-training for VGR in individuals with stroke (p < 0.001, CLES = 100) that were not observed in control participants (p = 0.87, CLES = 80). We observed significant changes from pre- to post-training in both VGR (Posture Speed, Reaction Time, Initial Direction Angle, Min-Max Speed Difference, and Movement Time) and APM (Contraction/Expansion Ratio<sub>x</sub> and Shift<sub>y</sub>) parameters.</p><p><strong>Conclusions: </strong>Our novel proprioceptive training paradigm is one of the first to implement a self-guided sensory training protocol. We observed improvements in motor function and proprioception for individuals with stroke. This pilot study demonstrates the feasibility of self-guided proprioceptive training to improve motor and sensory function in individuals with stroke. Future studies aim to examine multi-day training to examine longer-term impacts on upper limb sensorimotor function.</p>","PeriodicalId":16384,"journal":{"name":"Journal of NeuroEngineering and Rehabilitation","volume":"22 1","pages":"130"},"PeriodicalIF":5.2000,"publicationDate":"2025-06-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12145635/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of NeuroEngineering and Rehabilitation","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1186/s12984-025-01660-6","RegionNum":2,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
Background: Proprioceptive impairments of the upper limb are common after stroke. These impairments are not typically addressed during assessment or rehabilitation. Currently, most robotic paradigms for training of the upper limb have focused solely on improving motor function or have targeted proprioception in individuals with combined use of visual feedback. Our goal was to design a training paradigm that directly targets proprioception of the upper limb, while minimizing reliance on other sensory information to improve sensorimotor function after stroke.
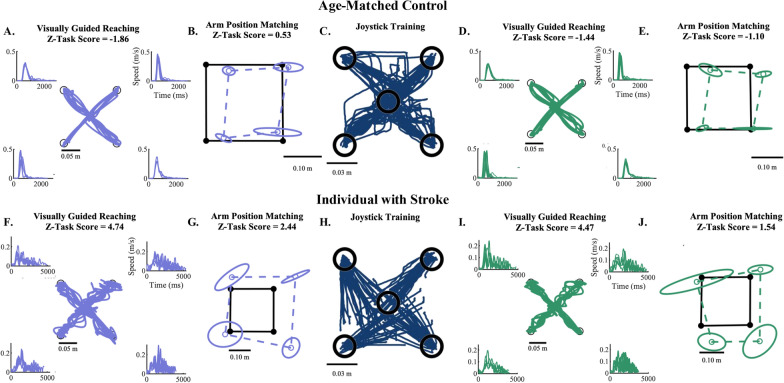
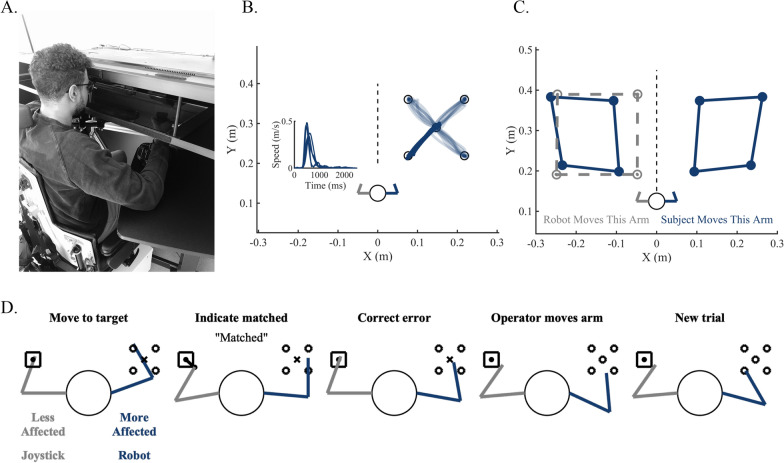
Methods: In this pilot study, 5 individuals with stroke and 5 age-matched controls were tested on a single-day proprioceptive training paradigm. Here, participants used a joystick with their less-affected arm to send commands to a KINARM exoskeleton that would passively move their more-affected arm. To complete the passive reaching task, participants relied only on proprioceptive feedback from the more-affected arm and were only given knowledge of results information after each trial. Sensorimotor function of the upper limb was measured pre- and post-training via robotic measures of motor function [Visually Guided Reaching (VGR)] and position sense [Arm Position Matching (APM)]. Sensorimotor function was quantified as a Task Score, which incorporated multiple task-relevant parameters for both VGR and APM. Changes in sensorimotor performance due to training were calculated as the pre- to post-training difference for VGR and APM within the control and stroke groups.
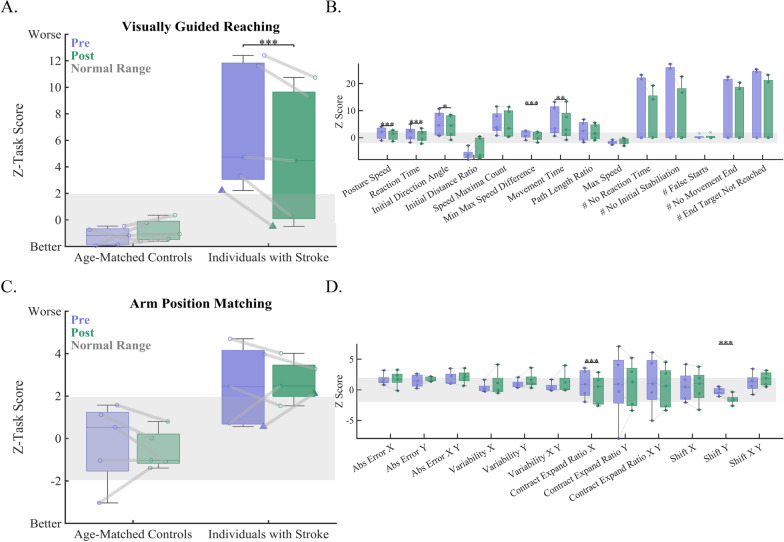
Results: We found significant improvements from pre-training to post-training for VGR in individuals with stroke (p < 0.001, CLES = 100) that were not observed in control participants (p = 0.87, CLES = 80). We observed significant changes from pre- to post-training in both VGR (Posture Speed, Reaction Time, Initial Direction Angle, Min-Max Speed Difference, and Movement Time) and APM (Contraction/Expansion Ratiox and Shifty) parameters.
Conclusions: Our novel proprioceptive training paradigm is one of the first to implement a self-guided sensory training protocol. We observed improvements in motor function and proprioception for individuals with stroke. This pilot study demonstrates the feasibility of self-guided proprioceptive training to improve motor and sensory function in individuals with stroke. Future studies aim to examine multi-day training to examine longer-term impacts on upper limb sensorimotor function.
期刊介绍:
Journal of NeuroEngineering and Rehabilitation considers manuscripts on all aspects of research that result from cross-fertilization of the fields of neuroscience, biomedical engineering, and physical medicine & rehabilitation.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


