Tao Gong, Yuanyuan Lin, Yufeng Wang, Wenbin Wang, Wei Chen, Jiancheng Charles Ji
{"title":"Dynamic Modeling and Simulation Analysis of an Arm Rehabilitation Robot With Mobile Platform.","authors":"Tao Gong, Yuanyuan Lin, Yufeng Wang, Wenbin Wang, Wei Chen, Jiancheng Charles Ji","doi":"10.1155/abb/8254911","DOIUrl":null,"url":null,"abstract":"<p><p>In response to the ever-increasing demand of upper limb rehabilitation training and function improvement, a novel arm rehabilitation robot with mobile platform, which can move on the table, is designed to facilitate the upper limbs strength training via the passive force field. The proposed robot provides three passive degrees of freedom (plane motion on the table and rotation around the vertical axis), which can fulfill the robot-aided trajectory training for upper limbs, such as shoulder, elbow, and wrist flexion/extension. Meanwhile, changed force field was established on the table via three elastic ropes. The user first connects the robot by the grab handle and arm support, then the screen displays the reference trajectory (RT) and notifies the user to manipulate the robot to draw the trajectory, the actual trajectory is calculated via the sensors and displayed to feed the user to adjust the muscular strength. In this paper, the reference trajectories, corresponding angular velocity of the wheels and the distribution of force field are analyzed via the dynamic modeling. Simulation studies are carried out to analyze the effectiveness of the theoretical model, kinematic performance, and distribution of force field. The path tracking simulation results showed that the peak error was 1.2 mm for the \"∞\" curve and 0.9 mm for the \"O\" curve. The force analysis results showed that the robot can generate the circinate force field and the maximum force of the whole workspace was 9.8 N with the elastic rigidity was 20 N/m. Furthermore, the maximum force was 11.02 N and the minimum force was 6.48 N when the robot moved along the of the circular path. These results demonstrate that the robot can generate appropriate force field to facilitate the motor training and paved the way to interventional therapy of the robot in the future. We will optimize the structure parameters and assemble a prototype to test the performance of the robot.</p>","PeriodicalId":8029,"journal":{"name":"Applied Bionics and Biomechanics","volume":"2025 ","pages":"8254911"},"PeriodicalIF":0.6000,"publicationDate":"2025-05-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12133355/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Applied Bionics and Biomechanics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1155/abb/8254911","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
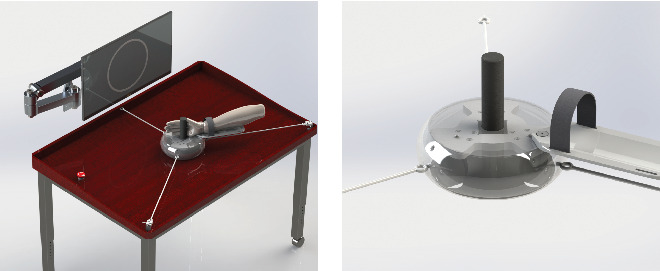
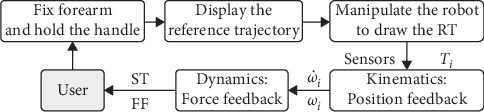
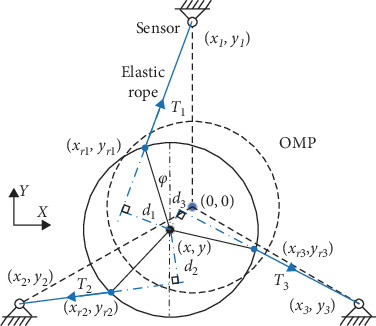
In response to the ever-increasing demand of upper limb rehabilitation training and function improvement, a novel arm rehabilitation robot with mobile platform, which can move on the table, is designed to facilitate the upper limbs strength training via the passive force field. The proposed robot provides three passive degrees of freedom (plane motion on the table and rotation around the vertical axis), which can fulfill the robot-aided trajectory training for upper limbs, such as shoulder, elbow, and wrist flexion/extension. Meanwhile, changed force field was established on the table via three elastic ropes. The user first connects the robot by the grab handle and arm support, then the screen displays the reference trajectory (RT) and notifies the user to manipulate the robot to draw the trajectory, the actual trajectory is calculated via the sensors and displayed to feed the user to adjust the muscular strength. In this paper, the reference trajectories, corresponding angular velocity of the wheels and the distribution of force field are analyzed via the dynamic modeling. Simulation studies are carried out to analyze the effectiveness of the theoretical model, kinematic performance, and distribution of force field. The path tracking simulation results showed that the peak error was 1.2 mm for the "∞" curve and 0.9 mm for the "O" curve. The force analysis results showed that the robot can generate the circinate force field and the maximum force of the whole workspace was 9.8 N with the elastic rigidity was 20 N/m. Furthermore, the maximum force was 11.02 N and the minimum force was 6.48 N when the robot moved along the of the circular path. These results demonstrate that the robot can generate appropriate force field to facilitate the motor training and paved the way to interventional therapy of the robot in the future. We will optimize the structure parameters and assemble a prototype to test the performance of the robot.
期刊介绍:
Applied Bionics and Biomechanics publishes papers that seek to understand the mechanics of biological systems, or that use the functions of living organisms as inspiration for the design new devices. Such systems may be used as artificial replacements, or aids, for their original biological purpose, or be used in a different setting altogether.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


