N Hutmacher, A Bellwald, R Rätz, G Gruener, P Eichelberger, N Lutz, V Steiner, A M Raab
{"title":"Identification of needs for an assistive robotic arm in individuals with tetraplegia: a mixed-methods approach.","authors":"N Hutmacher, A Bellwald, R Rätz, G Gruener, P Eichelberger, N Lutz, V Steiner, A M Raab","doi":"10.1186/s12984-025-01642-8","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>A severe spinal cord injury (SCI) can profoundly affect an individual's physical abilities and social independence. For individuals living with tetraplegia, an assistive robotic arm offers the potential to restore some autonomy and reduce the need for constant assistance. However, current assistive technologies are often costly, impractical, and fail to meet the needs of those affected. This leads to high rates of abandonment and user frustration with the technology. The aim of this study was to identify the needs and expectations of both individuals with tetraplegia and their caregivers regarding an assistive robotic arm in performing everyday activities.</p><p><strong>Methods: </strong>A mixed-method approach was used, beginning with a focus group interview and followed by two online surveys; one aimed at individuals with tetraplegia and the other at caregivers. Qualitative analysis of the focus groups was performed using Focus Group Illustration Mapping. The online surveys were analyzed descriptively and qualitatively using structured content analysis.</p><p><strong>Results: </strong>A total of seven participants (individuals with tetraplegia, caregivers, physiotherapists, and an engineer) took part in the focus group interview. The online surveys were completed by 49 individuals with tetraplegia and nine caregivers. The results showed that the participants were open to using a robotic arm but none used one at the time of reporting. The participants reported that a robotic arm should assist in unilateral activities such as reaching, grasping, handling objects and body manipulation. The greatest need was reported for functions related to object manipulation and for contact with the person's body. The participants reported wanting control over the robotic arm via voice commands or with a joystick. Concerns were reported regarding costs, the weight and the space required for the robotic arm.</p><p><strong>Conclusions: </strong>In our study, individuals with tetraplegia reported that they would use assistive robotic arms for activities related to reaching, grasping, and object manipulation. Concerns regarding costs, weight and space requirements were reported. Our findings provide insights from a user perspective, informing future technical developments relevant to the tetraplegic population. However, generalizability might be reduced.</p>","PeriodicalId":16384,"journal":{"name":"Journal of NeuroEngineering and Rehabilitation","volume":"22 1","pages":"113"},"PeriodicalIF":5.2000,"publicationDate":"2025-05-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12093749/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of NeuroEngineering and Rehabilitation","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1186/s12984-025-01642-8","RegionNum":2,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
Background: A severe spinal cord injury (SCI) can profoundly affect an individual's physical abilities and social independence. For individuals living with tetraplegia, an assistive robotic arm offers the potential to restore some autonomy and reduce the need for constant assistance. However, current assistive technologies are often costly, impractical, and fail to meet the needs of those affected. This leads to high rates of abandonment and user frustration with the technology. The aim of this study was to identify the needs and expectations of both individuals with tetraplegia and their caregivers regarding an assistive robotic arm in performing everyday activities.
Methods: A mixed-method approach was used, beginning with a focus group interview and followed by two online surveys; one aimed at individuals with tetraplegia and the other at caregivers. Qualitative analysis of the focus groups was performed using Focus Group Illustration Mapping. The online surveys were analyzed descriptively and qualitatively using structured content analysis.
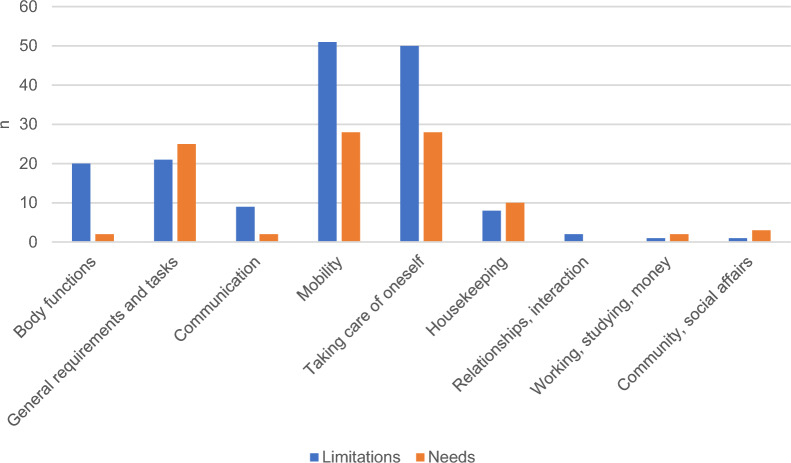
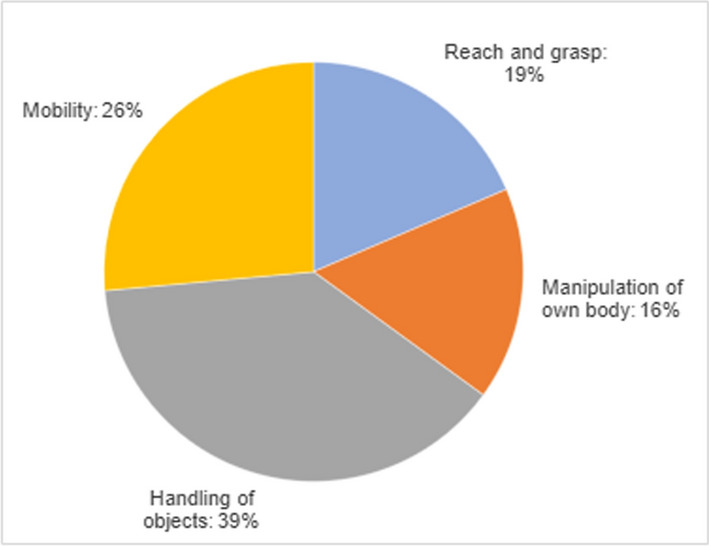
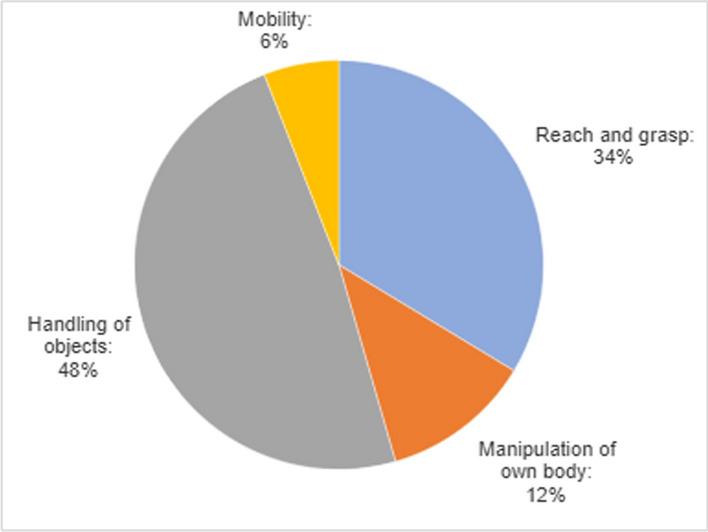
Results: A total of seven participants (individuals with tetraplegia, caregivers, physiotherapists, and an engineer) took part in the focus group interview. The online surveys were completed by 49 individuals with tetraplegia and nine caregivers. The results showed that the participants were open to using a robotic arm but none used one at the time of reporting. The participants reported that a robotic arm should assist in unilateral activities such as reaching, grasping, handling objects and body manipulation. The greatest need was reported for functions related to object manipulation and for contact with the person's body. The participants reported wanting control over the robotic arm via voice commands or with a joystick. Concerns were reported regarding costs, the weight and the space required for the robotic arm.
Conclusions: In our study, individuals with tetraplegia reported that they would use assistive robotic arms for activities related to reaching, grasping, and object manipulation. Concerns regarding costs, weight and space requirements were reported. Our findings provide insights from a user perspective, informing future technical developments relevant to the tetraplegic population. However, generalizability might be reduced.
期刊介绍:
Journal of NeuroEngineering and Rehabilitation considers manuscripts on all aspects of research that result from cross-fertilization of the fields of neuroscience, biomedical engineering, and physical medicine & rehabilitation.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


