Bashra Kadhim Oleiwi, Mohamed Jasim, Ahmad Taher Azar, Saim Ahmed, Ahmed Redha Mahlous
{"title":"Bat optimization of hybrid neural network-FOPID controllers for robust robot manipulator control.","authors":"Bashra Kadhim Oleiwi, Mohamed Jasim, Ahmad Taher Azar, Saim Ahmed, Ahmed Redha Mahlous","doi":"10.3389/frobt.2025.1487844","DOIUrl":null,"url":null,"abstract":"<p><p>The position and trajectory tracking control of rigid-link robot manipulators suffers from problems such as poor accuracy, unstable performance, and response caused by unidentified loads and outside disturbances. In this paper, three control structures have been proposed to control a multi-input, multi-output coupled nonlinear three-link rigid robot manipulator (3-LRRM) system and effectively solve the signal chattering in the control signal. To overcome these problems, three hybrid control structures based on combinations between the benefits of fractional order proportional-integral-derivative operations (FOPID) and the benefits of neural networks are proposed for a 3-LRRM. The first hybrid control scheme is a neural network- (NN) like fractional order proportional-integral plus an NN-like fractional order proportional derivative controller (NN-FOPIPD) and the second control scheme is an NN plus FOPID controller (NN + FOPID). In contrast, the third control scheme is the Elman NN-like FOPID controller (ELNN-FOPID). The bat optimization algorithm (BOA) is applied to find the best parameter values of the proposed control scheme by minimizing the performance index of the integral time square error (ITSE). MATLAB software is used to carry out the simulation results. Using the simulation tests, the performance of the suggested controllers is compared without retraining the controller parameters. The robustness of the designed control schemes' performance is assessed utilizing uncertainties in system parameters, outside disturbances, and initial position changes. The results show that the NN-FOPIPD structure demonstrated the best performance among the suggested controllers.</p>","PeriodicalId":47597,"journal":{"name":"Frontiers in Robotics and AI","volume":"12 ","pages":"1487844"},"PeriodicalIF":3.0000,"publicationDate":"2025-05-02","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12082718/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Robotics and AI","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3389/frobt.2025.1487844","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
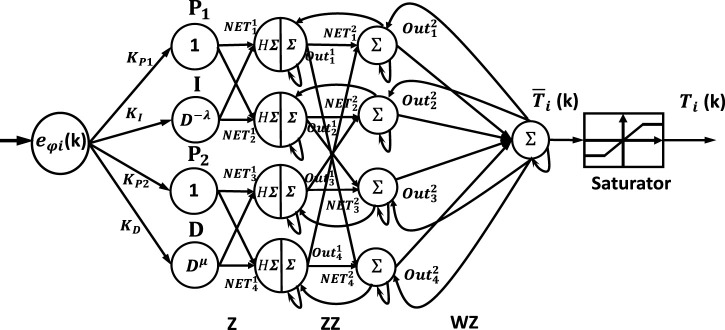
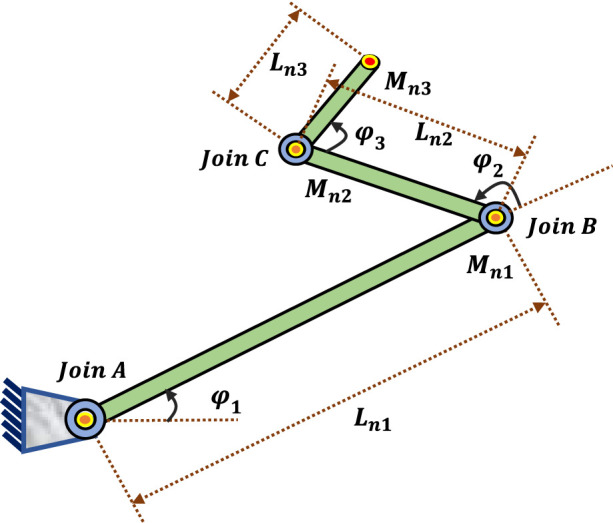
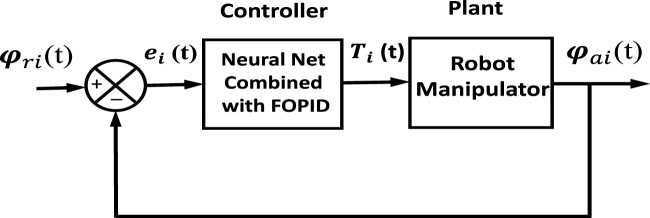
The position and trajectory tracking control of rigid-link robot manipulators suffers from problems such as poor accuracy, unstable performance, and response caused by unidentified loads and outside disturbances. In this paper, three control structures have been proposed to control a multi-input, multi-output coupled nonlinear three-link rigid robot manipulator (3-LRRM) system and effectively solve the signal chattering in the control signal. To overcome these problems, three hybrid control structures based on combinations between the benefits of fractional order proportional-integral-derivative operations (FOPID) and the benefits of neural networks are proposed for a 3-LRRM. The first hybrid control scheme is a neural network- (NN) like fractional order proportional-integral plus an NN-like fractional order proportional derivative controller (NN-FOPIPD) and the second control scheme is an NN plus FOPID controller (NN + FOPID). In contrast, the third control scheme is the Elman NN-like FOPID controller (ELNN-FOPID). The bat optimization algorithm (BOA) is applied to find the best parameter values of the proposed control scheme by minimizing the performance index of the integral time square error (ITSE). MATLAB software is used to carry out the simulation results. Using the simulation tests, the performance of the suggested controllers is compared without retraining the controller parameters. The robustness of the designed control schemes' performance is assessed utilizing uncertainties in system parameters, outside disturbances, and initial position changes. The results show that the NN-FOPIPD structure demonstrated the best performance among the suggested controllers.
期刊介绍:
Frontiers in Robotics and AI publishes rigorously peer-reviewed research covering all theory and applications of robotics, technology, and artificial intelligence, from biomedical to space robotics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


