{"title":"Robotic Caudate Lobectomy: Feasibility and Techniques with Da Vinci Xi and SP Systems.","authors":"Eun Jeong Jang, Kwan Woo Kim","doi":"10.4293/JSLS.2024.00057","DOIUrl":null,"url":null,"abstract":"<p><strong>Background and objectives: </strong>Minimally invasive hepatectomies, including laparoscopy and robotics, offer potential advantages over traditional open surgery, such as reduced postoperative pain, lower complication rates, and improved oncological outcomes. However, resections involving the caudate lobe remain technically demanding owing to its complex anatomy and proximity to major vasculature. This study aimed to evaluate the feasibility and safety of robotic caudate lobectomy in a small-volume center using both multiport and single-port systems.</p><p><strong>Methods: </strong>From January 2023 to May 2024, 3 patients underwent robotic caudate lobectomy at Dong-A University Hospital. Two procedures utilized the Da Vinci Xi multiport system, whereas 1 employed the Da Vinci SP single-port system. The surgical techniques and outcomes were analyzed in detail.</p><p><strong>Results: </strong>The first patient, with a 6.8-cm hemangioma, underwent Spiegel lobectomy with the Xi system in 157 minutes and was discharged on day 3 without complications. The second patient, with a 2.5-cm hepatocellular carcinoma, underwent complete caudate lobectomy using the Xi system and was discharged on day 5. The last patient, with a 3-cm cystic lesion, underwent Spiegel lobectomy with the SP system and was discharged on day 6.</p><p><strong>Conclusion: </strong>Our findings indicate that robotic caudate lobectomy is feasible and safe even in small-volume centers. Advanced robotic systems enable minimally invasive approaches to challenging liver resections, potentially achieving outcomes comparable with those in larger institutions. Further studies with larger patient cohorts are required to validate these findings.</p>","PeriodicalId":17679,"journal":{"name":"JSLS : Journal of the Society of Laparoendoscopic Surgeons","volume":"29 1","pages":""},"PeriodicalIF":1.8000,"publicationDate":"2025-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11973472/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"JSLS : Journal of the Society of Laparoendoscopic Surgeons","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.4293/JSLS.2024.00057","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/4/7 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"SURGERY","Score":null,"Total":0}
引用次数: 0
Abstract
Background and objectives: Minimally invasive hepatectomies, including laparoscopy and robotics, offer potential advantages over traditional open surgery, such as reduced postoperative pain, lower complication rates, and improved oncological outcomes. However, resections involving the caudate lobe remain technically demanding owing to its complex anatomy and proximity to major vasculature. This study aimed to evaluate the feasibility and safety of robotic caudate lobectomy in a small-volume center using both multiport and single-port systems.
Methods: From January 2023 to May 2024, 3 patients underwent robotic caudate lobectomy at Dong-A University Hospital. Two procedures utilized the Da Vinci Xi multiport system, whereas 1 employed the Da Vinci SP single-port system. The surgical techniques and outcomes were analyzed in detail.
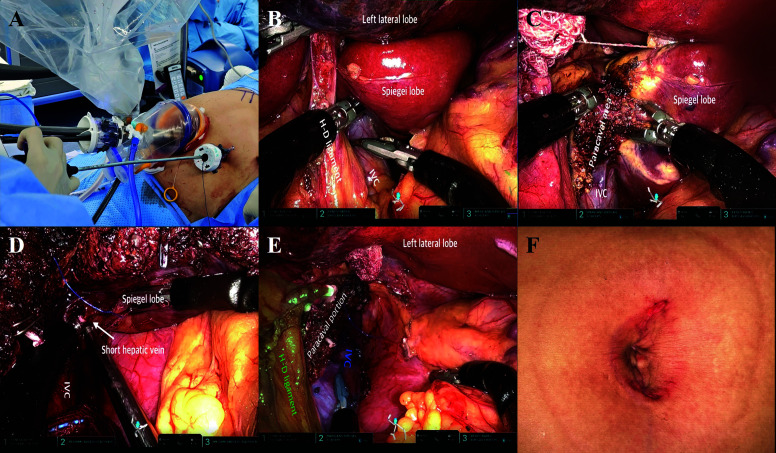
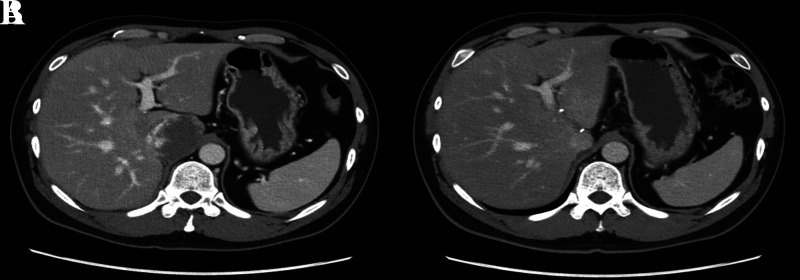
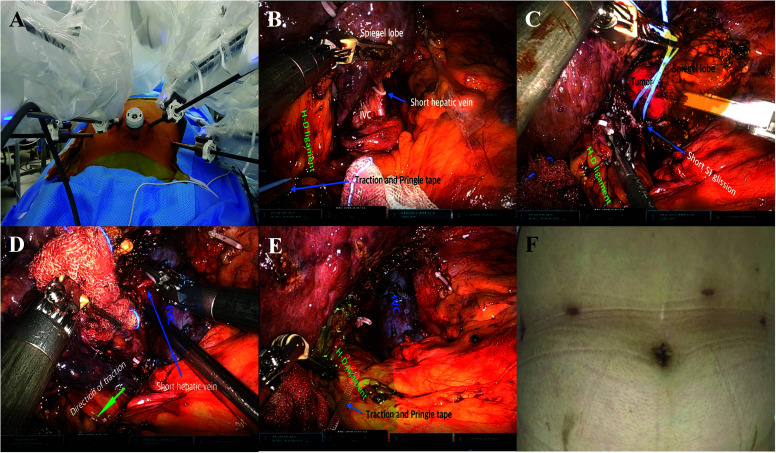
Results: The first patient, with a 6.8-cm hemangioma, underwent Spiegel lobectomy with the Xi system in 157 minutes and was discharged on day 3 without complications. The second patient, with a 2.5-cm hepatocellular carcinoma, underwent complete caudate lobectomy using the Xi system and was discharged on day 5. The last patient, with a 3-cm cystic lesion, underwent Spiegel lobectomy with the SP system and was discharged on day 6.
Conclusion: Our findings indicate that robotic caudate lobectomy is feasible and safe even in small-volume centers. Advanced robotic systems enable minimally invasive approaches to challenging liver resections, potentially achieving outcomes comparable with those in larger institutions. Further studies with larger patient cohorts are required to validate these findings.
期刊介绍:
JSLS, Journal of the Society of Laparoscopic & Robotic Surgeons publishes original scientific articles on basic science and technical topics in all the fields involved with laparoscopic, robotic, and minimally invasive surgery. CRSLS, MIS Case Reports from SLS is dedicated to the publication of Case Reports in the field of minimally invasive surgery. The journals seek to advance our understandings and practice of minimally invasive, image-guided surgery by providing a forum for all relevant disciplines and by promoting the exchange of information and ideas across specialties.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


