Sara Imboden, Damaris Erhardt, Siegenthaler Franziska, Mueller Michael David
{"title":"On-demand robotic surgery for hysterectomies: A combination of the best of robotic and laparoscopic approach.","authors":"Sara Imboden, Damaris Erhardt, Siegenthaler Franziska, Mueller Michael David","doi":"10.1177/17455057251325029","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>The advantage of robot-assisted hysterectomy over standard laparoscopy remains controversial. Conventional robots offer limited flexibility to the surgeon. The novel, Dexter robotic system™, allows integration and easy switch between the laparoscopic and robotic interface.</p><p><strong>Objectives: </strong>This study's objective is to evaluate the feasibility of using Dexter for robot-assisted laparoscopic hysterectomies by analyzing surgical data and intra- and postoperative complication rates.</p><p><strong>Design: </strong>Retrospective study.</p><p><strong>Methods: </strong>Women who underwent surgery using the Dexter robotic system at a University Hospital in Switzerland from March to December 2022 were included in this study. A comprehensive database containing coded demographic and clinical outcome data for these patients was analyzed for surgical data and intra- and postoperative complications.</p><p><strong>Results: </strong>We collected and evaluated data from 24 patients who underwent Dexter robot-assisted hysterectomies for indications like endometrial cancer, endometriosis, and uterine fibroids. For all patients, a hysterectomy was accompanied by other procedures such as radical lymphadenectomy or deep infiltrating endometriosis surgery that was mostly performed by conventional laparoscopy. The mean operating time was 171.9 min, with an average estimated blood loss of 130.8 ml. The patients stayed at the hospital for an average of 4 days. Clavien-Dindo grade III postoperative complications were reported in four patients with three vaginal dome infections and one umbilical (camera arm) trocar hernia. Importantly, there were no intraoperative complications or conversion to laparotomy among the operated patients.</p><p><strong>Conclusion: </strong>We present the first retrospective study reporting the feasibility of Dexter in robot-assisted laparoscopic hysterectomies. All surgeries were performed successfully without technical failure or device-related adverse events. In contrast to the other robotic systems, Dexter offers an on-demand platform, allowing the surgeon to switch between laparoscopic and robotic interfaces as required. Further research is needed to validate its potential advantages and broader applicability.</p>","PeriodicalId":75327,"journal":{"name":"Women's health (London, England)","volume":"21 ","pages":"17455057251325029"},"PeriodicalIF":2.9000,"publicationDate":"2025-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11952027/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Women's health (London, England)","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1177/17455057251325029","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/3/27 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
Abstract
Background: The advantage of robot-assisted hysterectomy over standard laparoscopy remains controversial. Conventional robots offer limited flexibility to the surgeon. The novel, Dexter robotic system™, allows integration and easy switch between the laparoscopic and robotic interface.
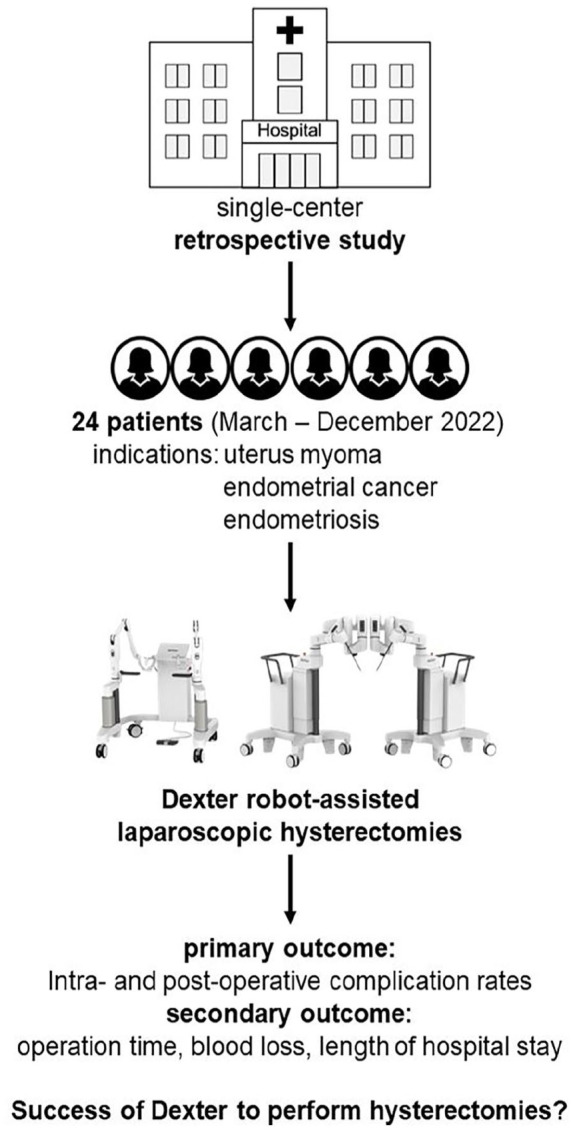
Objectives: This study's objective is to evaluate the feasibility of using Dexter for robot-assisted laparoscopic hysterectomies by analyzing surgical data and intra- and postoperative complication rates.
Design: Retrospective study.
Methods: Women who underwent surgery using the Dexter robotic system at a University Hospital in Switzerland from March to December 2022 were included in this study. A comprehensive database containing coded demographic and clinical outcome data for these patients was analyzed for surgical data and intra- and postoperative complications.
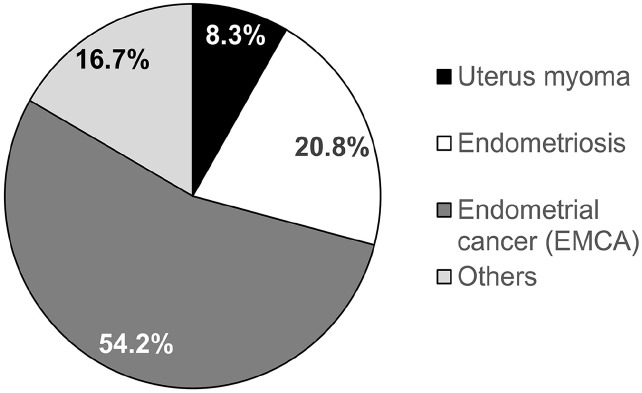
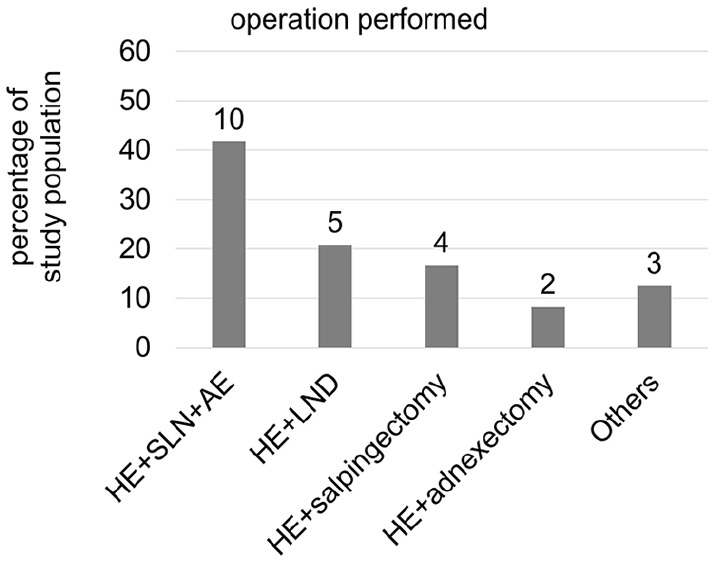
Results: We collected and evaluated data from 24 patients who underwent Dexter robot-assisted hysterectomies for indications like endometrial cancer, endometriosis, and uterine fibroids. For all patients, a hysterectomy was accompanied by other procedures such as radical lymphadenectomy or deep infiltrating endometriosis surgery that was mostly performed by conventional laparoscopy. The mean operating time was 171.9 min, with an average estimated blood loss of 130.8 ml. The patients stayed at the hospital for an average of 4 days. Clavien-Dindo grade III postoperative complications were reported in four patients with three vaginal dome infections and one umbilical (camera arm) trocar hernia. Importantly, there were no intraoperative complications or conversion to laparotomy among the operated patients.
Conclusion: We present the first retrospective study reporting the feasibility of Dexter in robot-assisted laparoscopic hysterectomies. All surgeries were performed successfully without technical failure or device-related adverse events. In contrast to the other robotic systems, Dexter offers an on-demand platform, allowing the surgeon to switch between laparoscopic and robotic interfaces as required. Further research is needed to validate its potential advantages and broader applicability.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


