Preserving and combining knowledge in robotic lifelong reinforcement learning
IF 23.9
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
Abstract
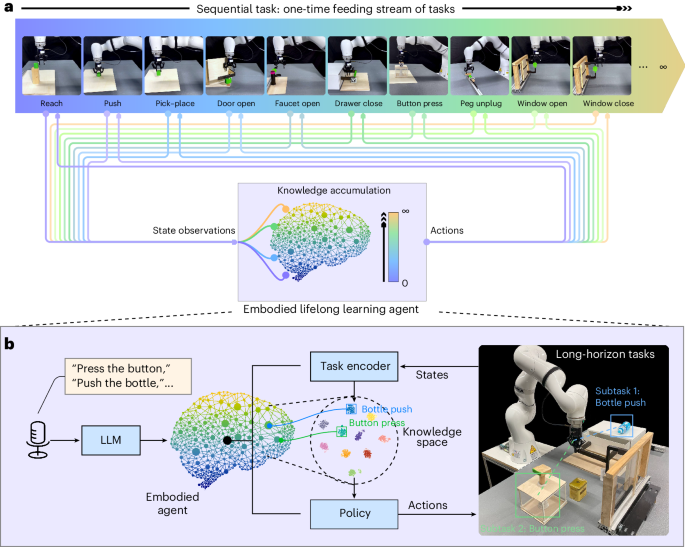
Humans can continually accumulate knowledge and develop increasingly complex behaviours and skills throughout their lives, which is a capability known as ‘lifelong learning’. Although this lifelong learning capability is considered an essential mechanism that makes up general intelligence, recent advancements in artificial intelligence predominantly excel in narrow, specialized domains and generally lack this lifelong learning capability. Here we introduce a robotic lifelong reinforcement learning framework that addresses this gap by developing a knowledge space inspired by the Bayesian non-parametric domain. In addition, we enhance the agent’s semantic understanding of tasks by integrating language embeddings into the framework. Our proposed embodied agent can consistently accumulate knowledge from a continuous stream of one-time feeding tasks. Furthermore, our agent can tackle challenging real-world long-horizon tasks by combining and reapplying its acquired knowledge from the original tasks stream. The proposed framework advances our understanding of the robotic lifelong learning process and may inspire the development of more broadly applicable intelligence. Humans continuously acquire knowledge and develop complex behaviours. Meng, Bing, Yao and colleagues present a robotic lifelong learning framework using a Bayesian non-parametric knowledge space, enabling agents to dynamically preserve and integrate knowledge from sequential tasks, enhancing adaptability.

机器人终身强化学习中的知识保存与组合
人类可以在一生中不断积累知识,发展出越来越复杂的行为和技能,这种能力被称为Äòlifelong学习,Äô。尽管这种终身学习能力被认为是构成一般智能的基本机制,但最近人工智能的进展主要表现在狭窄的专业领域,通常缺乏这种终身学习能力。在这里,我们引入了一个机器人终身强化学习框架,通过开发受贝叶斯非参数域启发的知识空间来解决这一差距。此外,我们通过将语言嵌入集成到框架中来增强代理Äôs对任务的语义理解。我们提出的具身智能体可以持续地从一次性喂食任务的连续流中积累知识。此外,我们的智能体可以通过组合和重新应用其从原始任务流中获得的知识来解决具有挑战性的现实世界的长期任务。提出的框架促进了我们对机器人终身学习过程的理解,并可能激发更广泛应用的智能的发展。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Nature Machine Intelligence
Multiple-
CiteScore
36.90
自引率
2.10%
发文量
127
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


