{"title":"Camera-view supervision for bird's-eye-view semantic segmentation.","authors":"Bowen Yang, LinLin Yu, Feng Chen","doi":"10.3389/fdata.2024.1431346","DOIUrl":null,"url":null,"abstract":"<p><p>Bird's-eye-view Semantic Segmentation (BEVSS) is a powerful and crucial component of planning and control systems in many autonomous vehicles. Current methods rely on end-to-end learning to train models, leading to indirectly supervised and inaccurate camera-to-BEV projections. We propose a novel method of supervising feature extraction with camera-view depth and segmentation information, which improves the quality of feature extraction and projection in the BEVSS pipeline. Our model, evaluated on the nuScenes dataset, shows a 3.8% improvement in Intersection-over-Union (IoU) for vehicle segmentation and a 30-fold reduction in depth error compared to baselines, while maintaining competitive inference times of 32 FPS. This method offers more accurate and reliable BEVSS for real-time autonomous driving systems. The codes and implementation details and code can be found at https://github.com/bluffish/sucam.</p>","PeriodicalId":52859,"journal":{"name":"Frontiers in Big Data","volume":"7 ","pages":"1431346"},"PeriodicalIF":2.4000,"publicationDate":"2024-11-15","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11604745/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Big Data","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3389/fdata.2024.1431346","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, INFORMATION SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
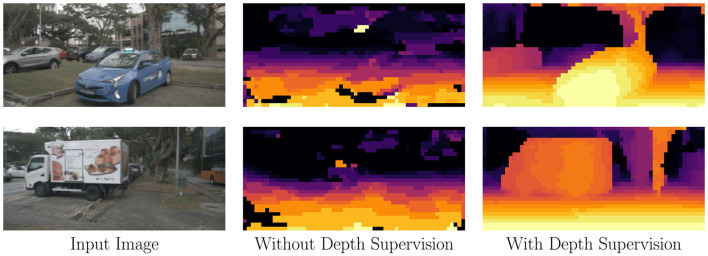
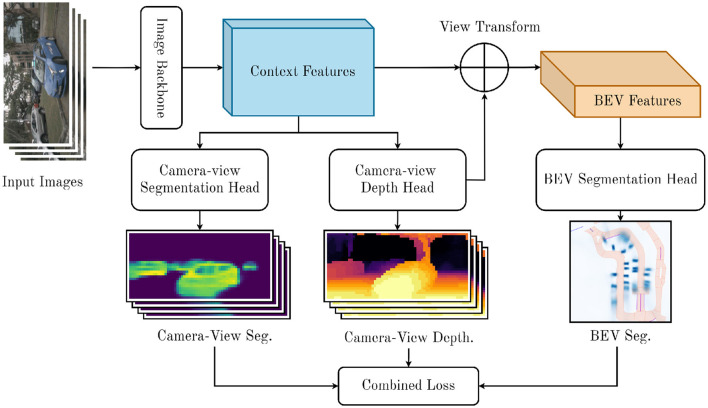
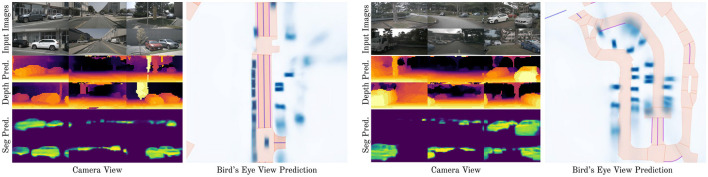
Bird's-eye-view Semantic Segmentation (BEVSS) is a powerful and crucial component of planning and control systems in many autonomous vehicles. Current methods rely on end-to-end learning to train models, leading to indirectly supervised and inaccurate camera-to-BEV projections. We propose a novel method of supervising feature extraction with camera-view depth and segmentation information, which improves the quality of feature extraction and projection in the BEVSS pipeline. Our model, evaluated on the nuScenes dataset, shows a 3.8% improvement in Intersection-over-Union (IoU) for vehicle segmentation and a 30-fold reduction in depth error compared to baselines, while maintaining competitive inference times of 32 FPS. This method offers more accurate and reliable BEVSS for real-time autonomous driving systems. The codes and implementation details and code can be found at https://github.com/bluffish/sucam.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


