Efficient data-driven joint-level calibration of cable-driven surgical robots
引用次数: 0
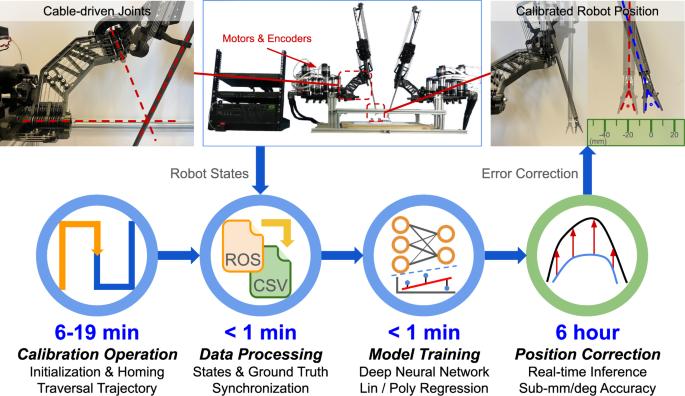
Abstract
Accurate joint position estimation is crucial for the control of cable-driven laparoscopic surgical robots like the RAVEN-II. However, any slack and stretch in the cable can lead to errors in kinematic estimation, complicating precise control. This work proposes an efficient data-driven calibration method, requiring no additional sensors post-training. The calibration takes 8–21 min and maintains high accuracy during a 6-hour heavily loaded operating. The Deep Neural Network (DNN) model reduces errors by 76%, achieving accuracy of 0.104∘, 0.120∘, and 0.118 mm for joints 1, 2, and 3, respectively. Compared to end-to-end models, the DNN achieves better accuracy and faster convergence by correcting original inaccurate joint positions. Additionally, a linear regression model offers 160 times faster inference speed than the DNN, suitable for RAVEN’s 1000 Hz control loop, with slight compromises in accuracy. This approach should significantly enhance the accuracy of similar cable-driven robots.
缆索驱动手术机器人的高效数据驱动关节级校准
准确的关节位置估计对于像RAVEN-II这样的电缆驱动腹腔镜手术机器人的控制至关重要。然而,电缆的任何松弛和拉伸都会导致运动学估计误差,使精确控制复杂化。这项工作提出了一种有效的数据驱动校准方法,不需要额外的传感器后训练。校准需要8-21分钟,并在6小时的重载操作中保持高精度。深度神经网络(Deep Neural Network, DNN)模型减少了76%的误差,对关节1、2和3的准确度分别达到0.104、0.120和0.118毫米。与端到端模型相比,DNN通过修正原始不准确的关节位置,实现了更好的精度和更快的收敛速度。此外,线性回归模型的推理速度比DNN快160倍,适用于RAVEN的1000 Hz控制回路,精度略有降低。这种方法将显著提高类似缆索驱动机器人的精度。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


