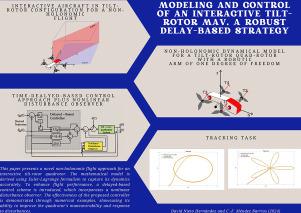
Modeling and control of an interactive tilt-rotor MAV. A robust delay-based strategy
IF 4.4
2区 数学
Q1 COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS
引用次数: 0
Abstract
This paper presents mathematical modeling and a delayed-based control scheme for a quadrotor configured with tilt-rotor capabilities. The proposed controller incorporates a nonlinear disturbance observer to enhance the aircraft’s operation against unknown disturbances. Integrating a tilting mechanism with a one-degree-of-freedom robotic arm improves upon the traditional quadrotor design, transforming it into an active flying drone capable of interacting with its surroundings. The tilting mechanism significantly extends the drone’s operational range, enabling it to access a wide working area. Furthermore, these enhancements empower the drone to undertake more complex tasks such as carrying payloads, grasping objects at high speeds, and utilizing sensors to detect cracks in pipelines, among other applications. In addition, we introduce a non-holonomic flight concept and derive its mathematical model in the restricted plane using the Euler–Lagrange formalism. Finally, we provide several numerical examples to illustrate the effectiveness of the proposed approach.
交互式倾转旋翼飞行器的建模与控制。基于延迟的稳健策略
本文介绍了针对具有倾斜旋翼功能的四旋翼飞行器的数学建模和基于延迟的控制方案。所提出的控制器包含一个非线性扰动观测器,以增强飞机在未知扰动下的运行能力。将倾斜机构与单自由度机械臂相结合,改进了传统的四旋翼设计,将其转变为能够与周围环境互动的主动飞行无人机。倾斜装置大大扩展了无人机的作业范围,使其能够进入宽阔的工作区域。此外,这些改进使无人机能够执行更复杂的任务,如携带有效载荷、高速抓取物体、利用传感器检测管道裂缝等。此外,我们还介绍了一种非符合人体工程学的飞行概念,并利用欧拉-拉格朗日形式主义推导出其在受限平面内的数学模型。最后,我们提供了几个数值示例来说明所提方法的有效性。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Mathematics and Computers in Simulation
数学-计算机:跨学科应用
CiteScore
8.90
自引率
4.30%
发文量
335
审稿时长
54 days
期刊介绍:
The aim of the journal is to provide an international forum for the dissemination of up-to-date information in the fields of the mathematics and computers, in particular (but not exclusively) as they apply to the dynamics of systems, their simulation and scientific computation in general. Published material ranges from short, concise research papers to more general tutorial articles.
Mathematics and Computers in Simulation, published monthly, is the official organ of IMACS, the International Association for Mathematics and Computers in Simulation (Formerly AICA). This Association, founded in 1955 and legally incorporated in 1956 is a member of FIACC (the Five International Associations Coordinating Committee), together with IFIP, IFAV, IFORS and IMEKO.
Topics covered by the journal include mathematical tools in:
•The foundations of systems modelling
•Numerical analysis and the development of algorithms for simulation
They also include considerations about computer hardware for simulation and about special software and compilers.
The journal also publishes articles concerned with specific applications of modelling and simulation in science and engineering, with relevant applied mathematics, the general philosophy of systems simulation, and their impact on disciplinary and interdisciplinary research.
The journal includes a Book Review section -- and a "News on IMACS" section that contains a Calendar of future Conferences/Events and other information about the Association.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


