Adaptive morphing of wing and tail for stable, resilient, and energy-efficient flight of avian-inspired drones
引用次数: 0
Abstract
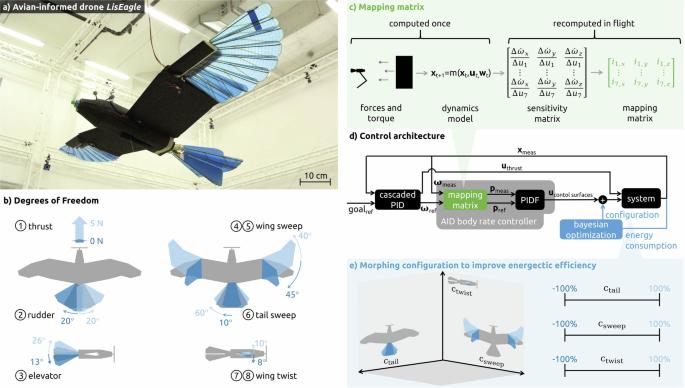
Avian-inspired drones feature morphing wing and tail surfaces, enhancing agility and adaptability in flight. Despite their large potential, realising their full capabilities remains challenging due to the lack of generalized control strategies accommodating their large degrees of freedom and cross-coupling effects between their control surfaces. Here we propose a new body-rate controller for avian-inspired drones that uses all available actuators to control the motion of the drone. The method exhibits robustness against physical perturbations, turbulent airflow, and even loss of certain actuators mid-flight. Furthermore, wing and tail morphing is leveraged to enhance energy efficiency at 8 m/s, 10 m/s, and 12 m/s using in-flight Bayesian optimization. The resulting morphing configurations yield significant gains across all three speeds of up to 11.5% compared to non-morphing configurations and display a strong resemblance to avian flight at different speeds. This research lays the groundwork for the development of autonomous avian-inspired drones that operate under diverse wind conditions, emphasizing the role of morphing in improving energy efficiency.
对机翼和机尾进行自适应变形,实现鸟类启发无人机的稳定、弹性和节能飞行
受鸟类启发的无人机具有变形翼面和尾翼,可增强飞行的灵活性和适应性。尽管这些无人机潜力巨大,但由于缺乏通用的控制策略来适应它们的大自由度和控制面之间的交叉耦合效应,要实现它们的全部能力仍然具有挑战性。在这里,我们为鸟类启发的无人机提出了一种新的体速率控制器,利用所有可用的致动器来控制无人机的运动。该方法对物理扰动、湍流气流,甚至飞行过程中某些致动器的丢失都具有鲁棒性。此外,还利用飞行中贝叶斯优化技术,在 8 米/秒、10 米/秒和 12 米/秒的速度下利用机翼和尾翼变形提高能效。与非变形配置相比,由此产生的变形配置在所有三种速度下都有显著增益,最高可达 11.5%,并在不同速度下显示出与鸟类飞行的高度相似性。这项研究为开发在不同风力条件下运行的受鸟类启发的自主无人机奠定了基础,同时强调了变形在提高能效方面的作用。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


