A soft skin with self-decoupled three-axis force-sensing taxels
IF 18.8
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
Abstract
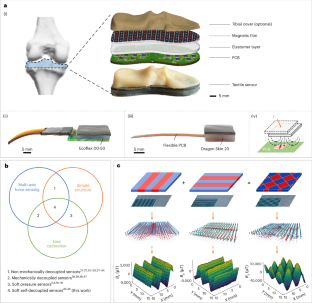
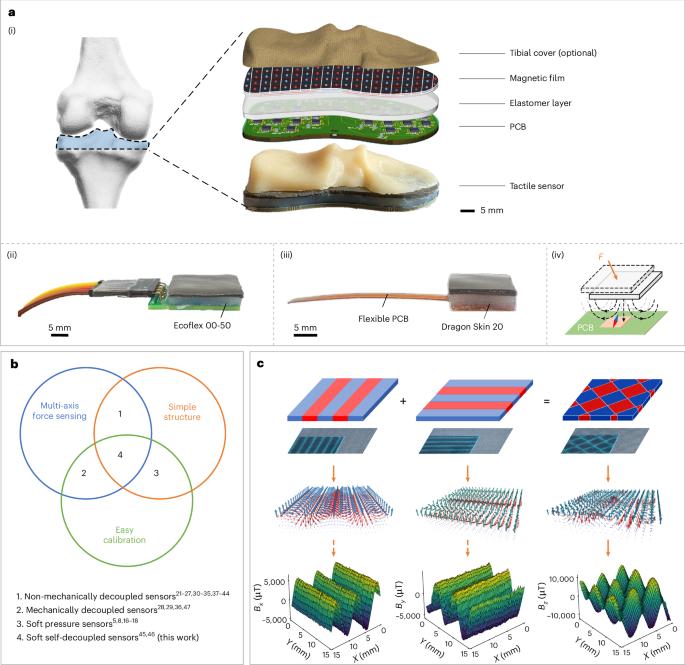
Electronic skins integrating both normal and shear force per taxel have a wide range of applications across diverse fields, including robotics, haptics and health monitoring. Current multi-axis tactile sensors often present complexities in structure and fabrication or require an extensive calibration process, limiting their widespread applications. Here we report an electronic soft magnetic skin capable of self-decoupling three-axis forces at each taxel. We use a simple sensor structure with customizable sensitivity and measurement range, reducing the calibration complexity from known quadratic (N2) or cubic (N3) scales down to a linear (3N) scale. The three-axis self-decoupling property of the sensor is achieved by overlaying two sinusoidally magnetized flexible magnetic films with orthogonal magnetization patterns. Leveraging the self-decoupling feature and its simple structure, we demonstrate that our sensor can facilitate a diverse range of applications, such as measuring the three-dimensional force distribution in artificial knee joints, teaching robots by touch demonstration and monitoring the interaction forces between knee braces and human skin during various activities. Electronic skin with decoupled force feedback is essential in robotics. Yan et al. develop a soft magnetic skin capable of self-decoupling three-axis forces per taxel, reducing calibration complexity from quadratic or cubic scales to a linear scale.
带有自解耦三轴力感应传感器的软皮肤
集成了法向力和剪切力的电子表皮可广泛应用于机器人、触觉和健康监测等多个领域。目前的多轴触觉传感器往往结构和制造复杂,或需要大量校准过程,限制了其广泛应用。在此,我们报告了一种电子软磁皮肤,它能够在每个滑轮上对三轴力进行自解耦。我们使用的传感器结构简单,灵敏度和测量范围可定制,将校准复杂度从已知的二次方(N2)或三次方(N3)尺度降低到线性(3N)尺度。传感器的三轴自解耦特性是通过叠加两层具有正交磁化模式的正弦磁化柔性磁性薄膜实现的。利用自解耦特性及其简单的结构,我们证明了我们的传感器可以促进多种应用,例如测量人工膝关节的三维力分布、通过触摸演示进行机器人教学,以及监测各种活动中膝套与人体皮肤之间的相互作用力。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Nature Machine Intelligence
Multiple-
CiteScore
36.90
自引率
2.10%
发文量
127
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


