A two-stage dynamic model updating method for the FRF prediction of the robotized mobile machining equipment
IF 9.1
1区 计算机科学
Q1 COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS
引用次数: 0
Abstract
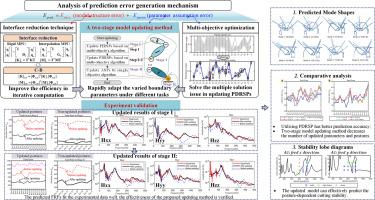
In the coming decades, robotized mobile machining equipment (RMME) is possible to evolve as a new branch of machine tools due to its exceptional flexibility. The frequency response function (FRF) serves as a theoretical foundation in controlling the vibration deformations that significantly limit the material removal efficiency of RMME. Model updating, aimed at minimizing errors between the theoretical model and the physical prototype, is essential to predict the FRF accurately. However, updating the dynamic model of RMME, characterized by non-mechanical boundary conditions, complex lightweight components, and low-stiffness structures, presents difficulties in computational efficiency and updating posture-dependent parameters. To solve these issues, the prediction error generation mechanism is first analyzed to confirm the error types that need to be eliminated in model updating. A two-stage model updating method that can separately update the robot structure and boundary-related parameters is proposed to rapidly update the dynamic model under various machining tasks. The interface reduction technique that can decrease the model order is introduced to reduce the computational consumption, and an approach to fast update such interface reduction substructures is put forward to avoid the reiterative model reduction during updating. An updating method for posture-dependent parameters based on multi-objective optimization is designed to control the multiple solution issues by generating many feasible solutions, ensuring the prediction effects for non-updated postures. The experimental results indicate that updating structural parameters in stage I and adsorption surface parameters in stage II results in mean error reduction percentages of 58.79 % and 48.30 %, respectively. Additionally, the natural frequencies and the mode shapes can also be predicted by the updated model. Comparative analysis with various controlled groups confirms the advantages of utilizing posture-dependent parameters in prediction accuracy and adopting the two-stage model updating method in efficiency. The proposed method can also be applied to other RMMEs.
机器人移动加工设备 FRF 预测的两阶段动态模型更新方法
在未来几十年中,机器人移动加工设备(RMME)因其卓越的灵活性有可能发展成为机床的一个新分支。频率响应函数(FRF)是控制振动变形的理论基础,而振动变形极大地限制了 RMME 的材料去除效率。模型更新旨在最大限度地减少理论模型与物理原型之间的误差,对于准确预测频率响应函数至关重要。然而,RMME 的动态模型具有非机械边界条件、复杂的轻质部件和低刚度结构等特点,更新模型在计算效率和更新与姿态相关的参数方面存在困难。为解决这些问题,首先分析了预测误差的产生机制,以确认模型更新中需要消除的误差类型。提出了一种可分别更新机器人结构和边界相关参数的两阶段模型更新方法,以快速更新各种加工任务下的动态模型。引入了可减少模型阶数的界面缩减技术以降低计算消耗,并提出了快速更新这种界面缩减子结构的方法,以避免更新过程中的重复模型缩减。设计了一种基于多目标优化的姿态相关参数更新方法,通过生成多个可行解来控制多解问题,确保未更新姿态的预测效果。实验结果表明,在第一阶段更新结构参数和在第二阶段更新吸附面参数后,平均误差降低率分别为 58.79 % 和 48.30 %。此外,更新后的模型还能预测固有频率和模态振型。与不同对照组的对比分析证实了利用姿态相关参数在预测精度上的优势,以及采用两阶段模型更新方法在效率上的优势。所提出的方法也可应用于其他 RMME。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

CiteScore
24.10
自引率
13.50%
发文量
160
审稿时长
50 days
期刊介绍:
The journal, Robotics and Computer-Integrated Manufacturing, focuses on sharing research applications that contribute to the development of new or enhanced robotics, manufacturing technologies, and innovative manufacturing strategies that are relevant to industry. Papers that combine theory and experimental validation are preferred, while review papers on current robotics and manufacturing issues are also considered. However, papers on traditional machining processes, modeling and simulation, supply chain management, and resource optimization are generally not within the scope of the journal, as there are more appropriate journals for these topics. Similarly, papers that are overly theoretical or mathematical will be directed to other suitable journals. The journal welcomes original papers in areas such as industrial robotics, human-robot collaboration in manufacturing, cloud-based manufacturing, cyber-physical production systems, big data analytics in manufacturing, smart mechatronics, machine learning, adaptive and sustainable manufacturing, and other fields involving unique manufacturing technologies.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


