Design and development of machine vision robotic arm for vegetable crops in hydroponics
IF 6.3
Q1 AGRICULTURAL ENGINEERING
引用次数: 0
Abstract
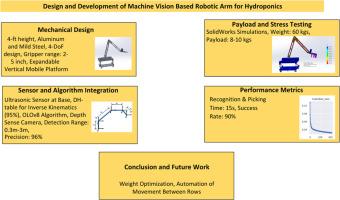
Modern agricultural machinery such as harvesting robotic arms are necessary to optimize the semi-automated agricultural processes to meet the ever-growing food needs of the population of the world. Production of low cost and highly efficient robotic arms are needed to meet the needs of the small-scale growers of underdeveloped countries. In this regard, mechanical design, sensor placement, and object identification are essential to optimize the performance of agricultural robots. This research is conducted to design a fully automated robotic arm for fruit picking in hydroponics system and research farm using machine vision to help the smallholders. For this purpose, a robotic arm with 1.3 m in height is designed using aluminum (18-gauge) and mild steel (MS-16) as fabrication material for the mechanical structure. The prototype design is tested for stress estimation at various payloads using SolidWorks simulations. The proposed robotic arm is based on a four degrees of freedom (4-DoF) design with the gripper having an opening range of 5.5 to 12 cm depending upon the task to handle various objects. The robotic arm is installed on an expandable vertical mobile platform that enables an expanded operational workspace with lower energy consumption. The total weight of the robotic arm is 60 kgs housing a payload capacity ranging between 8 and 10 kgs in accordance with industry-standard load-bearing specifications. The inverse kinematic algorithm using DH-table is computed with an accuracy of up to 95 % and target height of gripper is cross checked by mounting the ultrasonic sensor at the base of robotic arm. The YOLOv8 algorithm is used for object detection using the depth sense camera having angle range of 0.3 m to 3 m with the precision of up to 96 %. The time needed for recognition of fruits and pitching was about 15 s, with a success rate of up to 90 %. This research produces a low-cost and efficient solution for stallholders by developing a fully automated robotic arm for fruit picking. It optimizes agricultural productivity through improved mechanical design, sensor accuracy, and object detection which reduces labor costs by increasing efficiency of semi-automated farming systems. Further research is required to optimize the overall weight of the system and automation of the movement of robotic arm system between the consecutive rows to build a fully autonomous fruit picking operation in hydroponics.
设计和开发用于水培蔬菜作物的机器视觉机械臂
要优化半自动化农业流程,满足世界人口日益增长的粮食需求,就必须采用收割机械臂等现代农业机械。需要生产低成本、高效率的机械臂,以满足不发达国家小规模种植者的需求。在这方面,机械设计、传感器安置和物体识别对于优化农业机器人的性能至关重要。本研究旨在设计一种全自动机械臂,用于在水培系统和研究农场中使用机器视觉技术采摘水果,以帮助小农户。为此,使用铝(18 号)和低碳钢(MS-16)作为机械结构的制造材料,设计了一个高度为 1.3 米的机械臂。原型设计通过 SolidWorks 仿真对各种有效载荷下的应力估算进行了测试。拟议的机械臂基于四自由度(4-DoF)设计,抓手的开口范围为 5.5 至 12 厘米,具体取决于处理各种物体的任务。机械臂安装在一个可扩展的垂直移动平台上,可在降低能耗的同时扩大操作工作空间。机械臂的总重量为 60 千克,有效载荷为 8 至 10 千克,符合行业标准的承重规格。使用 DH 表计算的逆运动学算法精度高达 95%,并通过在机械臂底部安装超声波传感器来交叉检查抓手的目标高度。使用深度感应摄像头(角度范围为 0.3 米至 3 米)采用 YOLOv8 算法进行物体检测,精度高达 96%。识别水果和投球所需的时间约为 15 秒,成功率高达 90%。这项研究通过开发用于水果采摘的全自动机械臂,为摊主提供了一种低成本、高效率的解决方案。它通过改进机械设计、传感器精度和物体检测,优化了农业生产率,提高了半自动化农业系统的效率,从而降低了劳动力成本。还需要进一步研究如何优化系统的整体重量和机械臂系统在连续行间的自动化移动,以便在水培栽培中实现全自动水果采摘操作。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


