The docking control system of an autonomous underwater vehicle combining intelligent object recognition and deep reinforcement learning
IF 7.5
2区 计算机科学
Q1 AUTOMATION & CONTROL SYSTEMS
Engineering Applications of Artificial Intelligence
Pub Date : 2024-11-01
DOI:10.1016/j.engappai.2024.109565
引用次数: 0
Abstract
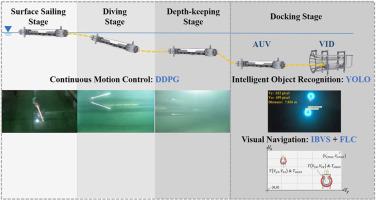
This study develops a visual-based docking system (VDS) for an autonomous underwater vehicle (AUV), significantly enhancing docking performance by integrating intelligent object recognition and deep reinforcement learning (DRL). The system overcomes traditional navigation limitations in complex and unpredictable environments by using a variable information dock (VID) for precise multi-sensor docking recognition in the AUV. Employing image-based visual servoing (IBVS) technology, the VDS efficiently converts 2D visual data into accurate 3D motion control commands. It integrates the YOLO (short for You Only Look Once) algorithm for object recognition and the deep deterministic policy gradient (DDPG) algorithm, improving continuous motion control, docking accuracy, and adaptability. Experimental validation at the National Cheng Kung University towing tank demonstrates that the VDS enhances control stability and operational reliability, reducing the mean absolute error (MAE) in depth control by 42.03% and pitch control by 98.02% compared to the previous method. These results confirm the VDS's reliability and its potential for transforming AUV docking.
结合智能物体识别和深度强化学习的自主潜水器对接控制系统
本研究为自主潜水器(AUV)开发了基于视觉的对接系统(VDS),通过集成智能物体识别和深度强化学习(DRL),显著提高了对接性能。该系统利用可变信息停靠点(VID)对自动潜航器进行精确的多传感器停靠识别,从而克服了复杂和不可预测环境中的传统导航限制。VDS 采用基于图像的视觉伺服(IBVS)技术,可有效地将二维视觉数据转换为精确的三维运动控制指令。它集成了用于物体识别的 YOLO(You Only Look Once 的缩写)算法和深度确定性策略梯度(DDPG)算法,提高了连续运动控制、对接精度和适应性。在成功大学拖曳坦克上进行的实验验证表明,VDS 增强了控制稳定性和运行可靠性,与以前的方法相比,深度控制的平均绝对误差(MAE)减少了 42.03%,俯仰控制减少了 98.02%。这些结果证实了 VDS 的可靠性及其改变 AUV 停靠的潜力。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Engineering Applications of Artificial Intelligence
工程技术-工程:电子与电气
CiteScore
9.60
自引率
10.00%
发文量
505
审稿时长
68 days
期刊介绍:
Artificial Intelligence (AI) is pivotal in driving the fourth industrial revolution, witnessing remarkable advancements across various machine learning methodologies. AI techniques have become indispensable tools for practicing engineers, enabling them to tackle previously insurmountable challenges. Engineering Applications of Artificial Intelligence serves as a global platform for the swift dissemination of research elucidating the practical application of AI methods across all engineering disciplines. Submitted papers are expected to present novel aspects of AI utilized in real-world engineering applications, validated using publicly available datasets to ensure the replicability of research outcomes. Join us in exploring the transformative potential of AI in engineering.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


