Variational resolution probability maps for multi-UAV search tasks with changeable searching behaviors
IF 5
1区 工程技术
Q1 ENGINEERING, AEROSPACE
引用次数: 0
Abstract
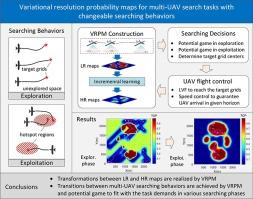
Cooperative search is a fundamental task in the autonomous control of multiple unmanned aerial vehicles (UAV) and much effort has been spent on finding an effective way to improve the global search performances. Two behavioral aspects are essentially considered during the multi-UAV cooperative search. One is the coverage (exploration) and the other is the retrospect to hotspot regions (exploitation). Most existing studies focus on the solutions to the former issue, by using the cognitive maps with fixed grid layouts, while ignoring the coexistence of both sides, which potentially induces the failures of finding hidden and indetectable targets. This paper presents a novel search method based on the cognitive maps with alternative grid settings, namely the variational resolution probability map (VRPM), to support the global searches with changeable phases and behaviors. To realize the transformations between different resolution maps in a given budget, the incremental learning is used to update the VRPM under limited number of samples. Potential games with different objectives are used to model the multi-UAV searching behaviors during explorations and exploitations. Lyapunov vector field (LVF) is then used to steer the UAVs toward their target grids in a given time horizon, so that the control period can be properly coincided with the temporal sequences of decision makings. Simulation results demonstrate the phase transitions from the explorations to the exploitations by the proposed method. Search accuracy and the retrospects to hotspot areas are also improved by comparison with the existing search strategies.
具有可变搜索行为的多无人机搜索任务的变分辨率概率图
合作搜索是多无人飞行器(UAV)自主控制中的一项基本任务,人们花费了大量精力来寻找提高全局搜索性能的有效方法。在多无人飞行器合作搜索过程中,主要考虑两个行为方面。一个是覆盖范围(探索),另一个是对热点区域的回溯(开发)。现有研究大多侧重于前一个问题的解决方案,即使用固定网格布局的认知地图,而忽略了双方共存的问题,这有可能导致无法找到隐藏和无法探测的目标。本文提出了一种基于认知图的新型搜索方法,即变异分辨率概率图(VRPM),以支持具有可变阶段和行为的全局搜索。为了在给定预算内实现不同分辨率地图之间的转换,我们采用了增量学习方法,在有限的样本数量下更新 VRPM。不同目标的潜在博弈被用来模拟探索和开发过程中的多无人机搜索行为。然后,利用 Lyapunov 向量场(LVF)引导无人飞行器在给定的时间范围内飞往目标网格,从而使控制期与决策的时间序列适当吻合。仿真结果表明了拟议方法从探索到利用的阶段转换。与现有搜索策略相比,搜索精度和对热点区域的回溯也得到了提高。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Aerospace Science and Technology
工程技术-工程:宇航
CiteScore
10.30
自引率
28.60%
发文量
654
审稿时长
54 days
期刊介绍:
Aerospace Science and Technology publishes articles of outstanding scientific quality. Each article is reviewed by two referees. The journal welcomes papers from a wide range of countries. This journal publishes original papers, review articles and short communications related to all fields of aerospace research, fundamental and applied, potential applications of which are clearly related to:
• The design and the manufacture of aircraft, helicopters, missiles, launchers and satellites
• The control of their environment
• The study of various systems they are involved in, as supports or as targets.
Authors are invited to submit papers on new advances in the following topics to aerospace applications:
• Fluid dynamics
• Energetics and propulsion
• Materials and structures
• Flight mechanics
• Navigation, guidance and control
• Acoustics
• Optics
• Electromagnetism and radar
• Signal and image processing
• Information processing
• Data fusion
• Decision aid
• Human behaviour
• Robotics and intelligent systems
• Complex system engineering.
Etc.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


