Chenxu Lu, Dilai Chen, Yi Qiu, Rui Song, Gang Shen
{"title":"A Non-Iterative Wheel-Rail Contact Geometry Determination Algorithm and Its Application","authors":"Chenxu Lu, Dilai Chen, Yi Qiu, Rui Song, Gang Shen","doi":"10.1002/adts.202400574","DOIUrl":null,"url":null,"abstract":"<p>To ensure a more accurate simulation of the wheel-rail contact state in vehicle-track interaction, a non-iterative contact geometry determination algorithm is proposed. This algorithm decouples lateral movement and roll, independently calculates the minimum wheel-rail gap on both sides, and overcomes the limitation of simultaneous wheel-rail contact on both sides. It can be applied to single-side and two-side wheel-rail separation problems. Additionally, by converting track irregularity and rail deformation into the reverse displacement of the wheel, it avoids real-time calculation of the wheel-rail spatial position, thereby improving calculation efficiency. The effectiveness of the algorithm is verified through Universal Mechanism software and field measurements. Subsequently, the influence of the measured wheel-rail profile, rail cant, and rail gauge on the wheel-rail contact characteristics is analyzed. Finally, vehicle shaking caused by track irregularity and wheel-rail contact is examined from the perspective of wheel-rail matching. The study demonstrates that the non-iterative algorithm is suitable for online simulation by pre-processing the contact geometry parameters. When the track gauge and rail cant increase, the distribution of wheel-rail contact points becomes more concentrated. Furthermore, when the excitation frequency of wheel-rail matching is close to the track irregularity excitation frequency, it causes vibration amplification, resulting in lateral vehicle shaking.</p>","PeriodicalId":7219,"journal":{"name":"Advanced Theory and Simulations","volume":"8 1","pages":""},"PeriodicalIF":2.9000,"publicationDate":"2024-10-09","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Advanced Theory and Simulations","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/adts.202400574","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
引用次数: 0
Abstract
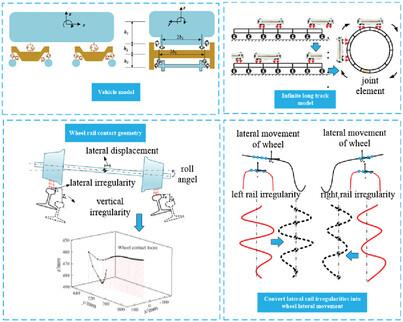
To ensure a more accurate simulation of the wheel-rail contact state in vehicle-track interaction, a non-iterative contact geometry determination algorithm is proposed. This algorithm decouples lateral movement and roll, independently calculates the minimum wheel-rail gap on both sides, and overcomes the limitation of simultaneous wheel-rail contact on both sides. It can be applied to single-side and two-side wheel-rail separation problems. Additionally, by converting track irregularity and rail deformation into the reverse displacement of the wheel, it avoids real-time calculation of the wheel-rail spatial position, thereby improving calculation efficiency. The effectiveness of the algorithm is verified through Universal Mechanism software and field measurements. Subsequently, the influence of the measured wheel-rail profile, rail cant, and rail gauge on the wheel-rail contact characteristics is analyzed. Finally, vehicle shaking caused by track irregularity and wheel-rail contact is examined from the perspective of wheel-rail matching. The study demonstrates that the non-iterative algorithm is suitable for online simulation by pre-processing the contact geometry parameters. When the track gauge and rail cant increase, the distribution of wheel-rail contact points becomes more concentrated. Furthermore, when the excitation frequency of wheel-rail matching is close to the track irregularity excitation frequency, it causes vibration amplification, resulting in lateral vehicle shaking.
期刊介绍:
Advanced Theory and Simulations is an interdisciplinary, international, English-language journal that publishes high-quality scientific results focusing on the development and application of theoretical methods, modeling and simulation approaches in all natural science and medicine areas, including:
materials, chemistry, condensed matter physics
engineering, energy
life science, biology, medicine
atmospheric/environmental science, climate science
planetary science, astronomy, cosmology
method development, numerical methods, statistics


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


