Construction of an improved semi-physical simulation system for UAV with integrated energy-consumption prediction model and its evaluation of the path planning algorithms in mountainous scenery
IF 6.7
1区 工程技术
Q1 COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS
引用次数: 0
Abstract
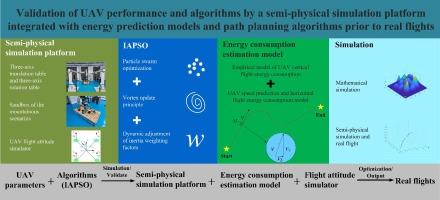
Unmanned Aerial Vehicles (UAVs) are playing an increasingly critical role in military surveillance missions. However, due to safety and economic issues, it is necessary to validate the UAV performance and algorithms in a semi-physical simulation environment before the real flights. In this study, the mechanical structure and control system of the semi-physical simulation system is developed for the UAVs. In order to better simulate the attitude of the UAV during a flight, the flight attitude simulator is designed. Also, a sand table of the mountainous scenery from real inspection tasks is developed to work with the simulation system. Path planning algorithms are embedded in the platform, and improvements and evaluations of traditional algorithms are carried out. Then, an improved adaptive particle swarm optimization (IAPSO) algorithm is proposed to improve the accuracy of the path of UAVs. An energy-consumption prediction model is established for the platform. By combining the IAPSO algorithm with the energy-consumption prediction model, the best path with low energy consumption can be obtained. Finally, the effectiveness of the simulation system is verified by comparison experiments of the mathematical simulation, semi-physical simulation, and real flight.
构建具有综合能耗预测模型的改进型无人机半物理仿真系统及其对山区路径规划算法的评估
无人飞行器(UAV)在军事侦察任务中发挥着越来越重要的作用。然而,由于安全和经济问题,在实际飞行之前,有必要在半物理仿真环境中验证无人机的性能和算法。本研究为无人机开发了半物理仿真系统的机械结构和控制系统。为了更好地模拟无人机飞行时的姿态,设计了飞行姿态模拟器。此外,还开发了实际巡查任务中的山地风光沙盘,以便与仿真系统配合使用。在平台中嵌入了路径规划算法,并对传统算法进行了改进和评估。然后,提出了一种改进的自适应粒子群优化(IAPSO)算法,以提高无人机的路径精度。建立了平台能耗预测模型。通过将 IAPSO 算法与能耗预测模型相结合,可以获得低能耗的最佳路径。最后,通过数学仿真、半物理仿真和实际飞行的对比实验验证了仿真系统的有效性。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
Computers & Industrial Engineering
工程技术-工程:工业
CiteScore
12.70
自引率
12.70%
发文量
794
审稿时长
10.6 months
期刊介绍:
Computers & Industrial Engineering (CAIE) is dedicated to researchers, educators, and practitioners in industrial engineering and related fields. Pioneering the integration of computers in research, education, and practice, industrial engineering has evolved to make computers and electronic communication integral to its domain. CAIE publishes original contributions focusing on the development of novel computerized methodologies to address industrial engineering problems. It also highlights the applications of these methodologies to issues within the broader industrial engineering and associated communities. The journal actively encourages submissions that push the boundaries of fundamental theories and concepts in industrial engineering techniques.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


