Sahin Lale, Peter I. Renn, Kamyar Azizzadenesheli, Babak Hassibi, Morteza Gharib, Anima Anandkumar
{"title":"FALCON: Fourier Adaptive Learning and Control for Disturbance Rejection Under Extreme Turbulence","authors":"Sahin Lale, Peter I. Renn, Kamyar Azizzadenesheli, Babak Hassibi, Morteza Gharib, Anima Anandkumar","doi":"10.1038/s44182-024-00013-0","DOIUrl":null,"url":null,"abstract":"Controlling aerodynamic forces in turbulent conditions is crucial for UAV operation. Traditional reactive methods often struggle due to unpredictable flow and sensor noise. We present FALCON (Fourier Adaptive Learning and Control), a model-based reinforcement learning framework for effective modeling and control of aerodynamic forces under turbulent flows. FALCON leverages two key insights: turbulent dynamics are well-modeled in the frequency domain, and most turbulent energy is concentrated in low-frequencies. FALCON learns a concise Fourier basis to model system dynamics from 35 s of flow data. To address sensor limitations, FALCON models dynamics using a short history of actions and measurements. With this approach, FALCON applies model predictive control for safe and efficient control. Tested in the Caltech wind tunnel under highly turbulent conditions, FALCON learns to control the underlying nonlinear dynamics with less than 9 min of data, consistently outperforming state-of-the-art methods. We provide guarantees for FALCON, ensuring stability and robustness.","PeriodicalId":499869,"journal":{"name":"npj Robotics","volume":" ","pages":"1-17"},"PeriodicalIF":0.0000,"publicationDate":"2024-09-24","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.nature.com/articles/s44182-024-00013-0.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"npj Robotics","FirstCategoryId":"1085","ListUrlMain":"https://www.nature.com/articles/s44182-024-00013-0","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
Abstract
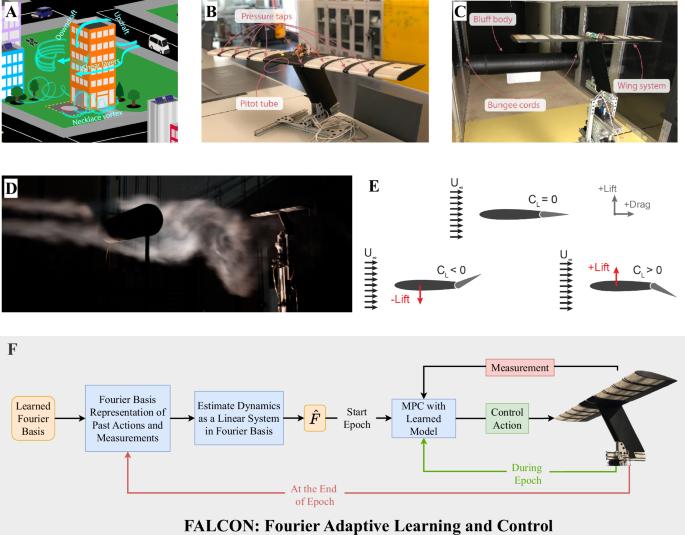
Controlling aerodynamic forces in turbulent conditions is crucial for UAV operation. Traditional reactive methods often struggle due to unpredictable flow and sensor noise. We present FALCON (Fourier Adaptive Learning and Control), a model-based reinforcement learning framework for effective modeling and control of aerodynamic forces under turbulent flows. FALCON leverages two key insights: turbulent dynamics are well-modeled in the frequency domain, and most turbulent energy is concentrated in low-frequencies. FALCON learns a concise Fourier basis to model system dynamics from 35 s of flow data. To address sensor limitations, FALCON models dynamics using a short history of actions and measurements. With this approach, FALCON applies model predictive control for safe and efficient control. Tested in the Caltech wind tunnel under highly turbulent conditions, FALCON learns to control the underlying nonlinear dynamics with less than 9 min of data, consistently outperforming state-of-the-art methods. We provide guarantees for FALCON, ensuring stability and robustness.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


