Yunke Ao , Hooman Esfandiari , Fabio Carrillo , Christoph J. Laux , Yarden As , Ruixuan Li , Kaat Van Assche , Ayoob Davoodi , Nicola A. Cavalcanti , Mazda Farshad , Benjamin F. Grewe , Emmanuel Vander Poorten , Andreas Krause , Philipp Fürnstahl
{"title":"SafeRPlan: Safe deep reinforcement learning for intraoperative planning of pedicle screw placement","authors":"Yunke Ao , Hooman Esfandiari , Fabio Carrillo , Christoph J. Laux , Yarden As , Ruixuan Li , Kaat Van Assche , Ayoob Davoodi , Nicola A. Cavalcanti , Mazda Farshad , Benjamin F. Grewe , Emmanuel Vander Poorten , Andreas Krause , Philipp Fürnstahl","doi":"10.1016/j.media.2024.103345","DOIUrl":null,"url":null,"abstract":"<div><p>Spinal fusion surgery requires highly accurate implantation of pedicle screw implants, which must be conducted in critical proximity to vital structures with a limited view of the anatomy. Robotic surgery systems have been proposed to improve placement accuracy. Despite remarkable advances, current robotic systems still lack advanced mechanisms for continuous updating of surgical plans during procedures, which hinders attaining higher levels of robotic autonomy. These systems adhere to conventional rigid registration concepts, relying on the alignment of preoperative planning to the intraoperative anatomy. In this paper, we propose a safe deep reinforcement learning (DRL) planning approach (SafeRPlan) for robotic spine surgery that leverages intraoperative observation for continuous path planning of pedicle screw placement. The main contributions of our method are (1) the capability to ensure safe actions by introducing an uncertainty-aware distance-based safety filter; (2) the ability to compensate for incomplete intraoperative anatomical information, by encoding a-priori knowledge of anatomical structures with neural networks pre-trained on pre-operative images; and (3) the capability to generalize over unseen observation noise thanks to the novel domain randomization techniques. Planning quality was assessed by quantitative comparison with the baseline approaches, gold standard (GS) and qualitative evaluation by expert surgeons. In experiments with human model datasets, our approach was capable of achieving over 5% higher safety rates compared to baseline approaches, even under realistic observation noise. To the best of our knowledge, SafeRPlan is the first safety-aware DRL planning approach specifically designed for robotic spine surgery.</p></div>","PeriodicalId":18328,"journal":{"name":"Medical image analysis","volume":"99 ","pages":"Article 103345"},"PeriodicalIF":10.7000,"publicationDate":"2024-09-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S1361841524002706/pdfft?md5=74703339b4aa1e7a3fd37730a5391672&pid=1-s2.0-S1361841524002706-main.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Medical image analysis","FirstCategoryId":"5","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S1361841524002706","RegionNum":1,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
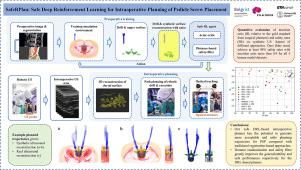
Spinal fusion surgery requires highly accurate implantation of pedicle screw implants, which must be conducted in critical proximity to vital structures with a limited view of the anatomy. Robotic surgery systems have been proposed to improve placement accuracy. Despite remarkable advances, current robotic systems still lack advanced mechanisms for continuous updating of surgical plans during procedures, which hinders attaining higher levels of robotic autonomy. These systems adhere to conventional rigid registration concepts, relying on the alignment of preoperative planning to the intraoperative anatomy. In this paper, we propose a safe deep reinforcement learning (DRL) planning approach (SafeRPlan) for robotic spine surgery that leverages intraoperative observation for continuous path planning of pedicle screw placement. The main contributions of our method are (1) the capability to ensure safe actions by introducing an uncertainty-aware distance-based safety filter; (2) the ability to compensate for incomplete intraoperative anatomical information, by encoding a-priori knowledge of anatomical structures with neural networks pre-trained on pre-operative images; and (3) the capability to generalize over unseen observation noise thanks to the novel domain randomization techniques. Planning quality was assessed by quantitative comparison with the baseline approaches, gold standard (GS) and qualitative evaluation by expert surgeons. In experiments with human model datasets, our approach was capable of achieving over 5% higher safety rates compared to baseline approaches, even under realistic observation noise. To the best of our knowledge, SafeRPlan is the first safety-aware DRL planning approach specifically designed for robotic spine surgery.
期刊介绍:
Medical Image Analysis serves as a platform for sharing new research findings in the realm of medical and biological image analysis, with a focus on applications of computer vision, virtual reality, and robotics to biomedical imaging challenges. The journal prioritizes the publication of high-quality, original papers contributing to the fundamental science of processing, analyzing, and utilizing medical and biological images. It welcomes approaches utilizing biomedical image datasets across all spatial scales, from molecular/cellular imaging to tissue/organ imaging.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


