Ivan Vogt, Marcel Eisenmann, Anton Schlünz, Robert Kowal, Daniel Düx, Maximilian Thormann, Julian Glandorf, Seben Sena Yerdelen, Marilena Georgiades, Robert Odenbach, Bennet Hensen, Marcel Gutberlet, Frank Wacker, Frank Fischbach, Georg Rose
{"title":"MRI-compatible and sensorless haptic feedback for cable-driven medical robotics to perform teleoperated needle-based interventions","authors":"Ivan Vogt, Marcel Eisenmann, Anton Schlünz, Robert Kowal, Daniel Düx, Maximilian Thormann, Julian Glandorf, Seben Sena Yerdelen, Marilena Georgiades, Robert Odenbach, Bennet Hensen, Marcel Gutberlet, Frank Wacker, Frank Fischbach, Georg Rose","doi":"10.1007/s11548-024-03267-z","DOIUrl":null,"url":null,"abstract":"<h3 data-test=\"abstract-sub-heading\">Purpose</h3><p>Surgical robotics have demonstrated their significance in assisting physicians during minimally invasive surgery. Especially, the integration of haptic and tactile feedback technologies can enhance the surgeon’s performance and overall patient outcomes. However, the current state-of-the-art lacks such interaction feedback opportunities, especially in robotic-assisted interventional magnetic resonance imaging (iMRI), which is gaining importance in clinical practice, specifically for percutaneous needle punctures.</p><h3 data-test=\"abstract-sub-heading\">Methods</h3><p>The cable-driven ‘Micropositioning Robotics for Image-Guided Surgery’ (µRIGS) system utilized the back-electromotive force effect of the stepper motor load to measure cable tensile forces without external sensors, employing the TMC5160 motor driver. The aim was to generate a sensorless haptic feedback (SHF) for remote needle advancement, incorporating collision detection and homing capabilities for internal automation processes. Three different phantoms capable of mimicking soft tissue were used to evaluate the difference in force feedback between manual needle puncture and the SHF, both technically and in terms of user experience.</p><h3 data-test=\"abstract-sub-heading\">Results</h3><p>The SHF achieved a sampling rate of 800 Hz and a mean force resolution of 0.26 ± 0.22 N, primarily dependent on motor current and rotation speed, with a mean maximum force of 15 N. In most cases, the SHF data aligned with the intended phantom-related force progression. The evaluation of the user study demonstrated no significant differences between the SHF technology and manual puncturing.</p><h3 data-test=\"abstract-sub-heading\">Conclusion</h3><p>The presented SHF of the µRIGS system introduced a novel MR-compatible technique to bridge the gap between medical robotics and interaction during real-time needle-based interventions.</p>","PeriodicalId":51251,"journal":{"name":"International Journal of Computer Assisted Radiology and Surgery","volume":null,"pages":null},"PeriodicalIF":2.3000,"publicationDate":"2024-09-12","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Computer Assisted Radiology and Surgery","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s11548-024-03267-z","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
Purpose
Surgical robotics have demonstrated their significance in assisting physicians during minimally invasive surgery. Especially, the integration of haptic and tactile feedback technologies can enhance the surgeon’s performance and overall patient outcomes. However, the current state-of-the-art lacks such interaction feedback opportunities, especially in robotic-assisted interventional magnetic resonance imaging (iMRI), which is gaining importance in clinical practice, specifically for percutaneous needle punctures.
Methods
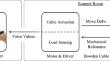
The cable-driven ‘Micropositioning Robotics for Image-Guided Surgery’ (µRIGS) system utilized the back-electromotive force effect of the stepper motor load to measure cable tensile forces without external sensors, employing the TMC5160 motor driver. The aim was to generate a sensorless haptic feedback (SHF) for remote needle advancement, incorporating collision detection and homing capabilities for internal automation processes. Three different phantoms capable of mimicking soft tissue were used to evaluate the difference in force feedback between manual needle puncture and the SHF, both technically and in terms of user experience.
Results
The SHF achieved a sampling rate of 800 Hz and a mean force resolution of 0.26 ± 0.22 N, primarily dependent on motor current and rotation speed, with a mean maximum force of 15 N. In most cases, the SHF data aligned with the intended phantom-related force progression. The evaluation of the user study demonstrated no significant differences between the SHF technology and manual puncturing.
Conclusion
The presented SHF of the µRIGS system introduced a novel MR-compatible technique to bridge the gap between medical robotics and interaction during real-time needle-based interventions.
期刊介绍:
The International Journal for Computer Assisted Radiology and Surgery (IJCARS) is a peer-reviewed journal that provides a platform for closing the gap between medical and technical disciplines, and encourages interdisciplinary research and development activities in an international environment.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


