Sainul Islam Ansary, Atul Mishra, Sankha Deb, Alok Kanti Deb
{"title":"A framework for robotic grasping of 3D objects in a tabletop environment","authors":"Sainul Islam Ansary, Atul Mishra, Sankha Deb, Alok Kanti Deb","doi":"10.1007/s11042-024-20178-y","DOIUrl":null,"url":null,"abstract":"<p><i>A</i>utomatic grasping of unknown 3D objects is still a very challenging problem in robotics. Such challenges mainly originate from the limitations of perception systems and implementations of the grasp planning methods for handling arbitrary 3D objects on real robot platforms. This paper presents a complete framework for robotic grasping of unknown 3D objects in a tabletop environment. The framework comprises of a 3D perception system for obtaining the complete point cloud of the objects, followed by a module for finding the best grasp by an object-slicing based grasp planner, a module for trajectory generation for pick and place operations, and finally performing the planned grasps on a real robot platform. The proposed 3D object perception captures the complete geometry information of the target object using two depth cameras placed at different locations. A hole-filling algorithm is also proposed to quickly fill the missing data points in the captured point cloud of target object. The object-slicing based grasp planner is extended to handle the obstacles posed by the neighbouring objects on a tabletop environment. Then, the proposed framework is tested on common household objects by performing pick and place operations on a real robot fitted with an adaptive gripper. Moreover, finding the best feasible grasp in the presence of neighbouring objects is also demonstrated such as avoiding the table-top and surrounding objects.</p>","PeriodicalId":18770,"journal":{"name":"Multimedia Tools and Applications","volume":"2 1","pages":""},"PeriodicalIF":3.0000,"publicationDate":"2024-09-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Multimedia Tools and Applications","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s11042-024-20178-y","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, INFORMATION SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
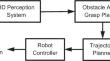
Automatic grasping of unknown 3D objects is still a very challenging problem in robotics. Such challenges mainly originate from the limitations of perception systems and implementations of the grasp planning methods for handling arbitrary 3D objects on real robot platforms. This paper presents a complete framework for robotic grasping of unknown 3D objects in a tabletop environment. The framework comprises of a 3D perception system for obtaining the complete point cloud of the objects, followed by a module for finding the best grasp by an object-slicing based grasp planner, a module for trajectory generation for pick and place operations, and finally performing the planned grasps on a real robot platform. The proposed 3D object perception captures the complete geometry information of the target object using two depth cameras placed at different locations. A hole-filling algorithm is also proposed to quickly fill the missing data points in the captured point cloud of target object. The object-slicing based grasp planner is extended to handle the obstacles posed by the neighbouring objects on a tabletop environment. Then, the proposed framework is tested on common household objects by performing pick and place operations on a real robot fitted with an adaptive gripper. Moreover, finding the best feasible grasp in the presence of neighbouring objects is also demonstrated such as avoiding the table-top and surrounding objects.
期刊介绍:
Multimedia Tools and Applications publishes original research articles on multimedia development and system support tools as well as case studies of multimedia applications. It also features experimental and survey articles. The journal is intended for academics, practitioners, scientists and engineers who are involved in multimedia system research, design and applications. All papers are peer reviewed.
Specific areas of interest include:
- Multimedia Tools:
- Multimedia Applications:
- Prototype multimedia systems and platforms

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


