Researching Performance of the Dubins Vehicle’s Hybrid Model with a Single Separation of the Control Objects
IF 0.5
4区 计算机科学
Q4 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
Journal of Computer and Systems Sciences International
Pub Date : 2024-08-13
DOI:10.1134/s1064230724700072
引用次数: 0
Abstract
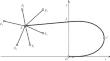
The problem of the performance of a hybrid system in which the number of control objects changes during its operation is considered. Movement is started by one control object (carrier). At some point in time, several moving objects are separated from it and sent to specified terminal states (targets). The carrier is represented by a hybrid model of the Dubins vehicle, allowing trajectories of unlimited curvature. The movement of separated objects is rectilinear with limited speeds and accelerations. The problem of minimizing the time to achieve all targets is solved.
研究控制对象单一分离的杜宾斯车辆混合动力模型的性能
摘要 本文考虑了一个混合系统的性能问题,该系统在运行过程中控制对象的数量会发生变化。一个控制对象(载体)开始运动。在某个时间点,几个运动物体从载体中分离出来,并被送往指定的终端状态(目标)。载体由杜宾斯飞行器的混合模型表示,其轨迹曲率不受限制。分离物体的运动为直线运动,速度和加速度有限。要解决的问题是尽量缩短实现所有目标的时间。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

CiteScore
1.50
自引率
33.30%
发文量
68
审稿时长
6-12 weeks
期刊介绍:
Journal of Computer and System Sciences International is a journal published in collaboration with the Russian Academy of Sciences. It covers all areas of control theory and systems. The journal features papers on the theory and methods of control, as well as papers devoted to the study, design, modeling, development, and application of new control systems. The journal publishes papers that reflect contemporary research and development in the field of control. Particular attention is given to applications of computer methods and technologies to control theory and control engineering. The journal publishes proceedings of international scientific conferences in the form of collections of regular journal articles and reviews by top experts on topical problems of modern studies in control theory.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


