{"title":"Data-driven linearization of dynamical systems.","authors":"George Haller, Bálint Kaszás","doi":"10.1007/s11071-024-10026-x","DOIUrl":null,"url":null,"abstract":"<p><p>Dynamic mode decomposition (DMD) and its variants, such as extended DMD (EDMD), are broadly used to fit simple linear models to dynamical systems known from observable data. As DMD methods work well in several situations but perform poorly in others, a clarification of the assumptions under which DMD is applicable is desirable. Upon closer inspection, existing interpretations of DMD methods based on the Koopman operator are not quite satisfactory: they justify DMD under assumptions that hold only with probability zero for generic observables. Here, we give a justification for DMD as a local, leading-order reduced model for the dominant system dynamics under conditions that hold with probability one for generic observables and non-degenerate observational data. We achieve this for autonomous and for periodically forced systems of finite or infinite dimensions by constructing linearizing transformations for their dominant dynamics within attracting slow spectral submanifolds (SSMs). Our arguments also lead to a new algorithm, data-driven linearization (DDL), which is a higher-order, systematic linearization of the observable dynamics within slow SSMs. We show by examples how DDL outperforms DMD and EDMD on numerical and experimental data.</p><p><strong>Supplementary information: </strong>The online version contains supplementary material available at 10.1007/s11071-024-10026-x.</p>","PeriodicalId":19723,"journal":{"name":"Nonlinear Dynamics","volume":"112 21","pages":"18639-18663"},"PeriodicalIF":5.2000,"publicationDate":"2024-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11362512/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nonlinear Dynamics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s11071-024-10026-x","RegionNum":2,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/8/15 0:00:00","PubModel":"Epub","JCR":"Q1","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
引用次数: 0
Abstract
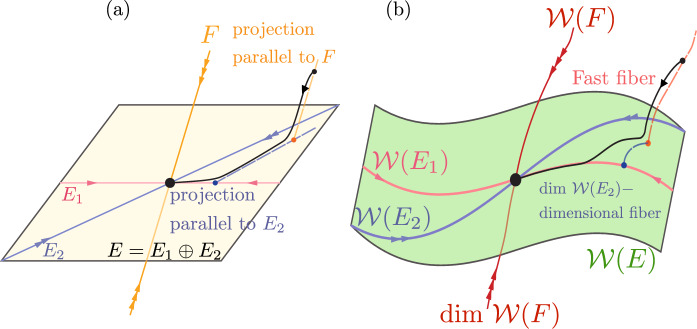
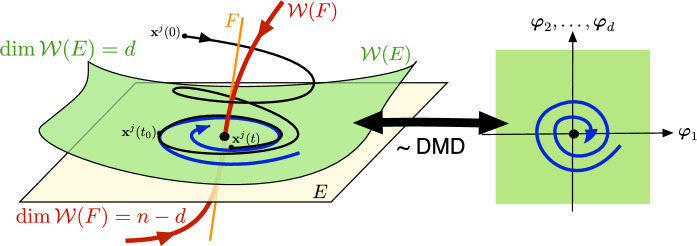
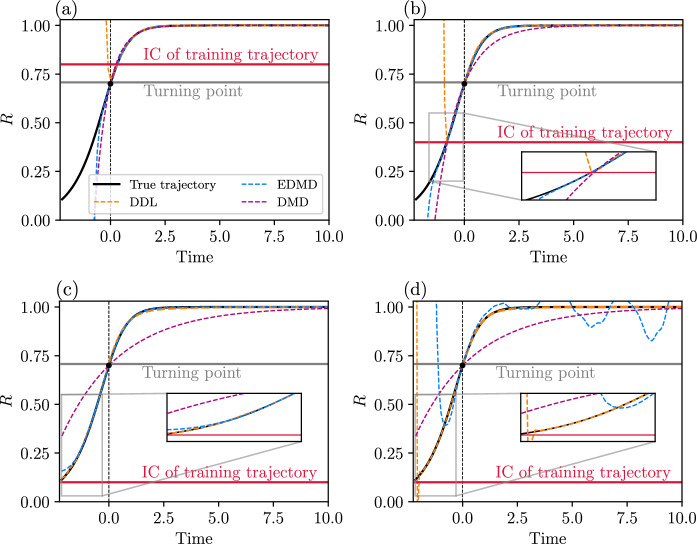
Dynamic mode decomposition (DMD) and its variants, such as extended DMD (EDMD), are broadly used to fit simple linear models to dynamical systems known from observable data. As DMD methods work well in several situations but perform poorly in others, a clarification of the assumptions under which DMD is applicable is desirable. Upon closer inspection, existing interpretations of DMD methods based on the Koopman operator are not quite satisfactory: they justify DMD under assumptions that hold only with probability zero for generic observables. Here, we give a justification for DMD as a local, leading-order reduced model for the dominant system dynamics under conditions that hold with probability one for generic observables and non-degenerate observational data. We achieve this for autonomous and for periodically forced systems of finite or infinite dimensions by constructing linearizing transformations for their dominant dynamics within attracting slow spectral submanifolds (SSMs). Our arguments also lead to a new algorithm, data-driven linearization (DDL), which is a higher-order, systematic linearization of the observable dynamics within slow SSMs. We show by examples how DDL outperforms DMD and EDMD on numerical and experimental data.
Supplementary information: The online version contains supplementary material available at 10.1007/s11071-024-10026-x.
期刊介绍:
Nonlinear Dynamics provides a forum for the rapid publication of original research in the field. The journal’s scope encompasses all nonlinear dynamic phenomena associated with mechanical, structural, civil, aeronautical, ocean, electrical, and control systems. Review articles and original contributions are based on analytical, computational, and experimental methods.
The journal examines such topics as perturbation and computational methods, symbolic manipulation, dynamic stability, local and global methods, bifurcations, chaos, and deterministic and random vibrations. The journal also investigates Lie groups, multibody dynamics, robotics, fluid-solid interactions, system modeling and identification, friction and damping models, signal analysis, and measurement techniques.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


