Coordinating limbs and spine: (Pareto-)optimal locomotion in theory, in vivo, and in robots
引用次数: 0
Abstract
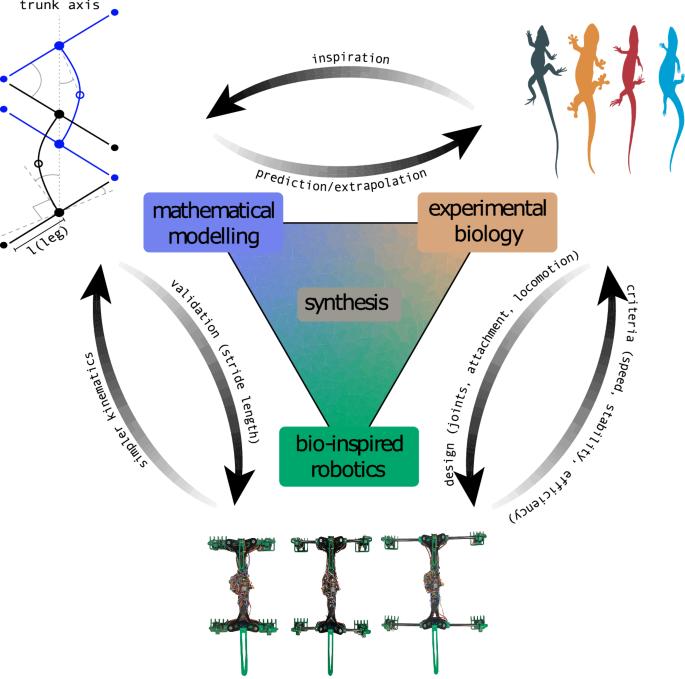
Among vertebrates, patterns of movement vary considerably, from the lateral spine-based movements of fish and salamanders to the predominantly limb-based movements of mammals. Yet, we know little about why these changes may have occurred in the course of evolution. Lizards form an interesting intermediate group where locomotion appears to be driven by both motion of their limbs and lateral spinal undulation. To understand the evolution and relative advantages of limb versus spine locomotion, we developed an empirically informed mathematical model as well as a robotic model and compared in silico predictions to in-vivo data from running and climbing lizards. Our mathematical model showed that, if limbs were allowed to grow to long lengths, movements of the spine did not enable longer strides, since spinal movements reduced the achievable range of motion of the limbs before collision. Yet, in-vivo data show lateral spine movement is widespread among a diverse group of lizards moving on level ground or climbing up and down surfaces. Our climbing robotic model was able to explain this disparity, showing that increased movement of the spine was energetically favourable, being associated with a reduced cost of transport. Our robot model also revealed that stability, as another performance criterion, decreased with increased spine and limb range of motion—detailing the trade-off between speed and stability. Overall, our robotic model found a Pareto-optimal set of strides—when considering speed, efficiency, and stability—requiring both spine and limb movement, which closely agreed with movement patterns among lizards. Thus we demonstrate how robotic models, in combination with theoretical considerations, can reveal fundamental insights into the evolution of movement strategies among a broad range of taxa.
协调四肢和脊柱:理论、体内和机器人的(帕累托)最佳运动方式
在脊椎动物中,运动模式差异很大,从鱼类和蝾螈的侧脊运动到哺乳动物主要以四肢为基础的运动。然而,我们对进化过程中为什么会发生这些变化知之甚少。蜥蜴是一个有趣的中间类群,它们的运动似乎同时受四肢运动和脊柱侧向起伏的驱动。为了了解肢体运动与脊柱运动的进化和相对优势,我们建立了一个基于经验的数学模型和一个机器人模型,并将模拟预测与蜥蜴奔跑和攀爬的体内数据进行了比较。我们的数学模型显示,如果允许四肢长到很长,脊柱的运动并不能使步幅变长,因为脊柱运动会减少四肢在碰撞前可达到的运动范围。然而,活体数据显示,脊柱的横向运动在平地运动或在地面上下攀爬的各类蜥蜴中十分普遍。我们的攀爬机器人模型能够解释这种差异,它显示脊柱运动的增加在能量上是有利的,与运输成本的降低有关。我们的机器人模型还显示,稳定性是另一个性能标准,随着脊柱和肢体活动范围的增加而降低,这说明了速度和稳定性之间的权衡。总之,我们的机器人模型在考虑速度、效率和稳定性的情况下,找到了一组需要脊柱和四肢同时运动的帕累托最优步幅,这与蜥蜴的运动模式非常吻合。因此,我们证明了机器人模型如何与理论考虑相结合,揭示各种类群运动策略进化的基本观点。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


