S. Fahira Haseen, P. Lakshmi, Vinodh Kumar Elumalai
{"title":"Novel HCOB3C Optimization Based Fuzzy Logic Controller Design for Experimental Active Suspension System","authors":"S. Fahira Haseen, P. Lakshmi, Vinodh Kumar Elumalai","doi":"10.1007/s40998-024-00746-6","DOIUrl":null,"url":null,"abstract":"<p>This paper puts forward a novel Hybrid Coyote Optimization-based Big Bang Big Crunch (HCOB<sup>3</sup>C) algorithm to design an optimal multi-objective fuzzy control framework applied to Active Suspension Systems (ASS). The suspension system in vehicles is an inherent component that is responsible for yielding passenger comfort and ensuring vehicle stability. Since ASS is a multi-objective, constrained non-linear system, the linear controllers will yield suboptimal results because of the so-called bode sensitivity integral problem. Hence, to handle the non-linearity and constraints in the ASS, we present a constrained multi-objective fuzzy controller optimized using the HCOB<sup>3</sup>C algorithm. The motivation for the proposed hybrid optimization algorithm is that the conventional Big-Bang Big Crunch Optimization (B<sup>3</sup>CO) and Coyote Optimization (CO) suffer from two major limitations namely 1. Imbalance between exploration and exploitation and 2. Slow convergence respectively. Hence, we utilize the CO to tune the parameters of B<sup>3</sup>CO to realize optimal actuator force that can offer precise suspension travel and minimize the chassis vibration even in the case of uneven road profile. The performance of the proposed scheme is experimentally validated on a quarter car ASS system for several realistic road profiles. The experimental results substantiate that the proposed scheme can minimize the vehicle vibration by around 41<i>.</i>6% compared to the Adaptive Neuro-Fuzzy Inference System (ANFIS) controller. In general, the HCOB<sup>3</sup>C-optimized FLC shows a 97% drop in vehicle vibration when compared to a passive system. Moreover, in line with the ISO 2631–1 standards, the analysis of key performance metrics of suspension systems including Frequency-Weighted Root Mean Square (FWRMS) and Vibration Dose Value (VDV) highlights the superiority of the proposed scheme in comparison with the state-of-the-art techniques.</p><h3 data-test=\"abstract-sub-heading\">Graphical Abstract</h3>\n","PeriodicalId":49064,"journal":{"name":"Iranian Journal of Science and Technology-Transactions of Electrical Engineering","volume":"69 1","pages":""},"PeriodicalIF":1.4000,"publicationDate":"2024-07-26","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Iranian Journal of Science and Technology-Transactions of Electrical Engineering","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s40998-024-00746-6","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
Abstract
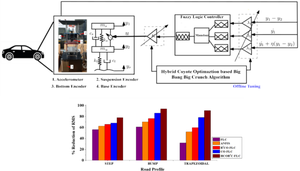
This paper puts forward a novel Hybrid Coyote Optimization-based Big Bang Big Crunch (HCOB3C) algorithm to design an optimal multi-objective fuzzy control framework applied to Active Suspension Systems (ASS). The suspension system in vehicles is an inherent component that is responsible for yielding passenger comfort and ensuring vehicle stability. Since ASS is a multi-objective, constrained non-linear system, the linear controllers will yield suboptimal results because of the so-called bode sensitivity integral problem. Hence, to handle the non-linearity and constraints in the ASS, we present a constrained multi-objective fuzzy controller optimized using the HCOB3C algorithm. The motivation for the proposed hybrid optimization algorithm is that the conventional Big-Bang Big Crunch Optimization (B3CO) and Coyote Optimization (CO) suffer from two major limitations namely 1. Imbalance between exploration and exploitation and 2. Slow convergence respectively. Hence, we utilize the CO to tune the parameters of B3CO to realize optimal actuator force that can offer precise suspension travel and minimize the chassis vibration even in the case of uneven road profile. The performance of the proposed scheme is experimentally validated on a quarter car ASS system for several realistic road profiles. The experimental results substantiate that the proposed scheme can minimize the vehicle vibration by around 41.6% compared to the Adaptive Neuro-Fuzzy Inference System (ANFIS) controller. In general, the HCOB3C-optimized FLC shows a 97% drop in vehicle vibration when compared to a passive system. Moreover, in line with the ISO 2631–1 standards, the analysis of key performance metrics of suspension systems including Frequency-Weighted Root Mean Square (FWRMS) and Vibration Dose Value (VDV) highlights the superiority of the proposed scheme in comparison with the state-of-the-art techniques.
本文提出了一种新颖的基于大爆炸大紧缩的混合丛林狼优化算法(HCOB3C),以设计一种应用于主动悬架系统(ASS)的多目标模糊控制优化框架。汽车悬架系统是一个固有组件,负责提供乘客舒适性和确保车辆稳定性。由于 ASS 是一个多目标、受约束的非线性系统,线性控制器会因为所谓的波德灵敏度积分问题而产生次优结果。因此,为了处理 ASS 中的非线性和约束,我们提出了一种使用 HCOB3C 算法优化的约束多目标模糊控制器。提出混合优化算法的动机在于,传统的大爆炸大紧缩优化算法(B3CO)和土狼优化算法(CO)存在两大局限性,即 1. 探索和利用之间的不平衡;2.收敛速度慢。因此,我们利用 CO 来调整 B3CO 的参数,以实现最佳的致动器力,从而提供精确的悬架行程,即使在路面不平的情况下也能将底盘振动降至最低。针对几种实际路面情况,在四分之一轿车 ASS 系统上对所提方案的性能进行了实验验证。实验结果证明,与自适应神经模糊推理系统(ANFIS)控制器相比,所提出的方案可将车辆振动减小约 41.6%。总体而言,与被动系统相比,经过 HCOB3C 优化的 FLC 可将车辆振动降低 97%。此外,根据 ISO 2631-1 标准,对悬挂系统的关键性能指标(包括频率加权均方根(FWRMS)和振动剂量值(VDV))进行了分析,结果表明,与最先进的技术相比,所提出的方案更具优势。
期刊介绍:
Transactions of Electrical Engineering is to foster the growth of scientific research in all branches of electrical engineering and its related grounds and to provide a medium by means of which the fruits of these researches may be brought to the attentionof the world’s scientific communities.
The journal has the focus on the frontier topics in the theoretical, mathematical, numerical, experimental and scientific developments in electrical engineering as well
as applications of established techniques to new domains in various electical engineering disciplines such as:
Bio electric, Bio mechanics, Bio instrument, Microwaves, Wave Propagation, Communication Theory, Channel Estimation, radar & sonar system, Signal Processing, image processing, Artificial Neural Networks, Data Mining and Machine Learning, Fuzzy Logic and Systems, Fuzzy Control, Optimal & Robust ControlNavigation & Estimation Theory, Power Electronics & Drives, Power Generation & Management The editors will welcome papers from all professors and researchers from universities, research centers,
organizations, companies and industries from all over the world in the hope that this will advance the scientific standards of the journal and provide a channel of communication between Iranian Scholars and their colleague in other parts of the world.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


