Accuracy of dental implant placement using different dynamic navigation and robotic systems: an in vitro study
IF 12.4
1区 医学
Q1 HEALTH CARE SCIENCES & SERVICES
引用次数: 0
Abstract
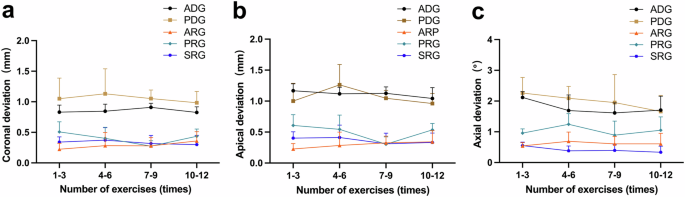
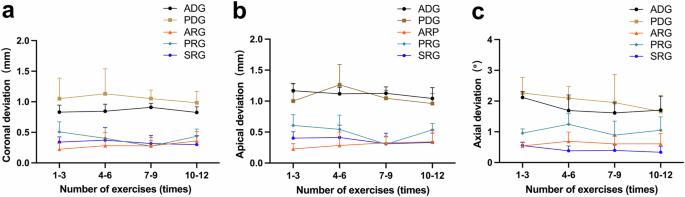
Computer-aided implant surgery has undergone continuous development in recent years. In this study, active and passive systems of dynamic navigation were divided into active dynamic navigation system group and passive dynamic navigation system group (ADG and PDG), respectively. Active, passive and semi-active implant robots were divided into active robot group, passive robot group and semi-active robot group (ARG, PRG and SRG), respectively. Each group placed two implants (FDI tooth positions 31 and 36) in a model 12 times. The accuracy of 216 implants in 108 models were analysed. The coronal deviations of ADG, PDG, ARG, PRG and SRG were 0.85 ± 0.17 mm, 1.05 ± 0.42 mm, 0.29 ± 0.15 mm, 0.40 ± 0.16 mm and 0.33 ± 0.14 mm, respectively. The apical deviations of the five groups were 1.11 ± 0.23 mm, 1.07 ± 0.38 mm, 0.29 ± 0.15 mm, 0.50 ± 0.19 mm and 0.36 ± 0.16 mm, respectively. The axial deviations of the five groups were 1.78 ± 0.73°, 1.99 ± 1.20°, 0.61 ± 0.25°, 1.04 ± 0.37° and 0.42 ± 0.18°, respectively. The coronal, apical and axial deviations of ADG were higher than those of ARG, PRG and SRG (all P < 0.001). Similarly, the coronal, apical and axial deviations of PDG were higher than those of ARG, PRG, and SRG (all P < 0.001). Dynamic and robotic computer-aided implant surgery may show good implant accuracy in vitro. However, the accuracy and stability of implant robots are higher than those of dynamic navigation systems.
使用不同动态导航和机器人系统植入牙科植入物的准确性:一项体外研究。
近年来,计算机辅助种植手术得到了不断发展。本研究将动态导航系统的主动和被动系统分别分为主动动态导航系统组和被动动态导航系统组(ADG 和 PDG)。主动、被动和半主动种植机器人分别分为主动机器人组、被动机器人组和半主动机器人组(ARG、PRG 和 SRG)。每组在一个模型上植入两颗种植体(FDI 牙位 31 和 36)12 次。分析了 108 个模型中 216 个种植体的准确性。ADG、PDG、ARG、PRG 和 SRG 的冠状偏差分别为 0.85 ± 0.17 mm、1.05 ± 0.42 mm、0.29 ± 0.15 mm、0.40 ± 0.16 mm 和 0.33 ± 0.14 mm。五组的根尖偏差分别为 1.11 ± 0.23 毫米、1.07 ± 0.38 毫米、0.29 ± 0.15 毫米、0.50 ± 0.19 毫米和 0.36 ± 0.16 毫米。五组的轴向偏差分别为 1.78 ± 0.73°、1.99 ± 1.20°、0.61 ± 0.25°、1.04 ± 0.37°和 0.42 ± 0.18°。ADG 的冠状面偏差、根尖偏差和轴向偏差均高于 ARG、PRG 和 SRG(均 P
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

NPJ Digital Medicine
Multiple-
CiteScore
25.10
自引率
3.30%
发文量
170
审稿时长
15 weeks
期刊介绍:
npj Digital Medicine is an online open-access journal that focuses on publishing peer-reviewed research in the field of digital medicine. The journal covers various aspects of digital medicine, including the application and implementation of digital and mobile technologies in clinical settings, virtual healthcare, and the use of artificial intelligence and informatics.
The primary goal of the journal is to support innovation and the advancement of healthcare through the integration of new digital and mobile technologies. When determining if a manuscript is suitable for publication, the journal considers four important criteria: novelty, clinical relevance, scientific rigor, and digital innovation.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


