Visual odometry with neuromorphic resonator networks
IF 18.8
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
Abstract
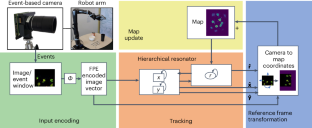
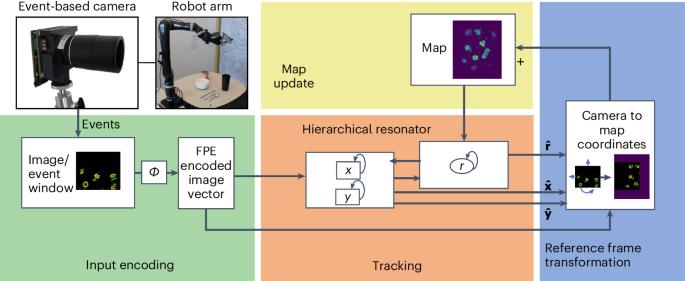
Visual odometry (VO) is a method used to estimate self-motion of a mobile robot using visual sensors. Unlike odometry based on integrating differential measurements that can accumulate errors, such as inertial sensors or wheel encoders, VO is not compromised by drift. However, image-based VO is computationally demanding, limiting its application in use cases with low-latency, low-memory and low-energy requirements. Neuromorphic hardware offers low-power solutions to many vision and artificial intelligence problems, but designing such solutions is complicated and often has to be assembled from scratch. Here we propose the use of vector symbolic architecture (VSA) as an abstraction layer to design algorithms compatible with neuromorphic hardware. Building from a VSA model for scene analysis, described in our companion paper, we present a modular neuromorphic algorithm that achieves state-of-the-art performance on two-dimensional VO tasks. Specifically, the proposed algorithm stores and updates a working memory of the presented visual environment. Based on this working memory, a resonator network estimates the changing location and orientation of the camera. We experimentally validate the neuromorphic VSA-based approach to VO with two benchmarks: one based on an event-camera dataset and the other in a dynamic scene with a robotic task. Visual odometry, or self-motion estimation, is a fundamental task in robotics. Renner, Supic and colleagues introduce a neuromorphic algorithm for visual odometry that leverages hyperdimensional computing and hierarchical resonators. The approach estimates a robot’s motion from event-based vision, a step towards low-power machine vision for robotics.
利用神经形态共振网络进行视觉里程测量
视觉里程计(VO)是一种利用视觉传感器估算移动机器人自我运动的方法。不同于惯性传感器或轮子编码器等基于积分差分测量的里程测量法,视觉里程测量法不会受到漂移的影响。然而,基于图像的 VO 对计算要求很高,这限制了它在低延迟、低内存和低能耗要求的使用案例中的应用。神经形态硬件为许多视觉和人工智能问题提供了低功耗解决方案,但设计这种解决方案非常复杂,通常需要从头开始组装。在此,我们建议使用矢量符号架构(VSA)作为抽象层,设计与神经形态硬件兼容的算法。在我们的配套论文中描述的用于场景分析的 VSA 模型的基础上,我们提出了一种模块化神经形态算法,该算法在二维 VO 任务上实现了最先进的性能。具体来说,所提出的算法存储并更新呈现视觉环境的工作记忆。在此工作记忆的基础上,谐振器网络会估算出摄像头不断变化的位置和方向。我们通过两个基准实验验证了基于神经形态 VSA 的虚拟现实方法:一个基于事件摄像机数据集,另一个基于机器人任务的动态场景。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Nature Machine Intelligence
Multiple-
CiteScore
36.90
自引率
2.10%
发文量
127
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


