Sarasij Banerjee , Rachael T. Kha , Daniel E. Rivera , Eric Hekler
{"title":"Predicting goal attainment in process-oriented behavioral interventions using a data-driven system identification approach","authors":"Sarasij Banerjee , Rachael T. Kha , Daniel E. Rivera , Eric Hekler","doi":"10.1016/j.jprocont.2024.103242","DOIUrl":null,"url":null,"abstract":"<div><p>Behavioral interventions (such as those developed to increase physical activity, achieve smoking cessation, or weight loss) can be represented as dynamic process systems incorporating a multitude of factors, ranging from cognitive (internal) to environmental (external) influences. This facilitates the application of system identification and control engineering methods to address questions such as: what drives individuals to improve health behaviors (such as engaging in physical activity)? In this paper, the goal is to efficiently estimate personalized, dynamic models which in turn will lead to control systems that can optimize this behavior. This problem is examined in system identification applied to the <em>Just Walk</em> study that aimed to increase walking behavior in sedentary adults. The paper presents a Discrete Simultaneous Perturbation Stochastic Approximation (DSPSA)-based modeling of the <em>Goal Attainment</em> construct estimated using AutoRegressive with eXogenous inputs (ARX) models. Feature selection of participants and ARX order selection is achieved through the DSPSA algorithm, which efficiently handles computationally expensive calculations. DSPSA can search over large sets of features as well as regressor structures in an informed, principled manner to model behavioral data within reasonable computational time. DSPSA estimation highlights the large individual variability in motivating factors among participants in <em>Just Walk</em>, thus emphasizing the importance of a personalized approach for optimized behavioral interventions.</p></div>","PeriodicalId":50079,"journal":{"name":"Journal of Process Control","volume":"139 ","pages":"Article 103242"},"PeriodicalIF":3.3000,"publicationDate":"2024-05-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Process Control","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0959152424000829","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
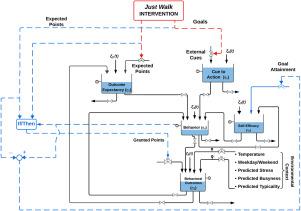
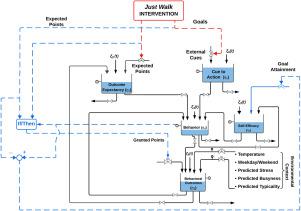
Behavioral interventions (such as those developed to increase physical activity, achieve smoking cessation, or weight loss) can be represented as dynamic process systems incorporating a multitude of factors, ranging from cognitive (internal) to environmental (external) influences. This facilitates the application of system identification and control engineering methods to address questions such as: what drives individuals to improve health behaviors (such as engaging in physical activity)? In this paper, the goal is to efficiently estimate personalized, dynamic models which in turn will lead to control systems that can optimize this behavior. This problem is examined in system identification applied to the Just Walk study that aimed to increase walking behavior in sedentary adults. The paper presents a Discrete Simultaneous Perturbation Stochastic Approximation (DSPSA)-based modeling of the Goal Attainment construct estimated using AutoRegressive with eXogenous inputs (ARX) models. Feature selection of participants and ARX order selection is achieved through the DSPSA algorithm, which efficiently handles computationally expensive calculations. DSPSA can search over large sets of features as well as regressor structures in an informed, principled manner to model behavioral data within reasonable computational time. DSPSA estimation highlights the large individual variability in motivating factors among participants in Just Walk, thus emphasizing the importance of a personalized approach for optimized behavioral interventions.
期刊介绍:
This international journal covers the application of control theory, operations research, computer science and engineering principles to the solution of process control problems. In addition to the traditional chemical processing and manufacturing applications, the scope of process control problems involves a wide range of applications that includes energy processes, nano-technology, systems biology, bio-medical engineering, pharmaceutical processing technology, energy storage and conversion, smart grid, and data analytics among others.
Papers on the theory in these areas will also be accepted provided the theoretical contribution is aimed at the application and the development of process control techniques.
Topics covered include:
• Control applications• Process monitoring• Plant-wide control• Process control systems• Control techniques and algorithms• Process modelling and simulation• Design methods
Advanced design methods exclude well established and widely studied traditional design techniques such as PID tuning and its many variants. Applications in fields such as control of automotive engines, machinery and robotics are not deemed suitable unless a clear motivation for the relevance to process control is provided.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


