Juan Zaragoza Chichell , Alena Rečková , Michal Bizzarri , Michael Bartoň
{"title":"Collision-free Tool Motion Planning for 5-Axis CNC Machining with Toroidal Cutters","authors":"Juan Zaragoza Chichell , Alena Rečková , Michal Bizzarri , Michael Bartoň","doi":"10.1016/j.cad.2024.103725","DOIUrl":null,"url":null,"abstract":"<div><p>Collision detection is a crucial part of CNC machining, however, many state-of-the-art algorithms test collisions as a post-process, after the path-planning stage, or use conservative approaches that result in low machining accuracy in the neighborhood of the cutter’s contact paths. We propose a fast collision detection test that does not require a costly construction of the configuration space nor high-resolution sampling of the cutter’s axis and uses the information of the neighboring points to efficiently prune away points of the axis that cannot cause collisions. The proposed collision detection test is incorporated directly as a part of the tool motion-planning stage, enabling design of highly-accurate motions of a toroidal cutting tool along free-form geometries. We validate our algorithm on a variety of benchmark surfaces, showing that our results provide high-quality approximations with provably non-colliding motions.</p></div>","PeriodicalId":50632,"journal":{"name":"Computer-Aided Design","volume":"173 ","pages":"Article 103725"},"PeriodicalIF":3.1000,"publicationDate":"2024-05-11","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Computer-Aided Design","FirstCategoryId":"94","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S0010448524000526","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, SOFTWARE ENGINEERING","Score":null,"Total":0}
引用次数: 0
Abstract
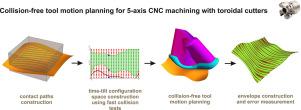
Collision detection is a crucial part of CNC machining, however, many state-of-the-art algorithms test collisions as a post-process, after the path-planning stage, or use conservative approaches that result in low machining accuracy in the neighborhood of the cutter’s contact paths. We propose a fast collision detection test that does not require a costly construction of the configuration space nor high-resolution sampling of the cutter’s axis and uses the information of the neighboring points to efficiently prune away points of the axis that cannot cause collisions. The proposed collision detection test is incorporated directly as a part of the tool motion-planning stage, enabling design of highly-accurate motions of a toroidal cutting tool along free-form geometries. We validate our algorithm on a variety of benchmark surfaces, showing that our results provide high-quality approximations with provably non-colliding motions.
期刊介绍:
Computer-Aided Design is a leading international journal that provides academia and industry with key papers on research and developments in the application of computers to design.
Computer-Aided Design invites papers reporting new research, as well as novel or particularly significant applications, within a wide range of topics, spanning all stages of design process from concept creation to manufacture and beyond.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


