{"title":"Skin lesion image segmentation based on improved U-shaped network","authors":"Yuhang Zhao, Tianxing Yan, Yaermaimaiti Yilihamu","doi":"10.1007/s41315-024-00337-y","DOIUrl":null,"url":null,"abstract":"<p>Skin lesion segmentation is an important step to help us in skin cancer diagnosis. However, skin lesions have variable shapes, fuzzy boundaries, and various colors, which bring challenges to the accurate segmentation of skin lesions. In this paper, we propose an Enhanced Deep Information Fusion based on residual U-net (ED-ResUnet). Firstly, the coding part is improved into a residual network structure, and more feature information is obtained by stacking residual blocks. Secondly, a Channel shuffling hybrid dilated convolution module is designed to increase the receptive field, so that the network pays more attention to deep feature information and strengthens the transmission of context information. Then, the context fusion module and Polarized Self-Attention module are introduced into the encoder to suppress interference information and retain effective lesion location information. Finally, the experimental results on the ISIC 2017 dermoscopy image dataset show that the Dice Coefficient of the segmentation results of the proposed algorithm reaches 87.43%, which is 8.81% higher than that of the original U-Net network and 5.7% higher than that of the UNet++ network. It can segment melanoma effectively.</p>","PeriodicalId":44563,"journal":{"name":"International Journal of Intelligent Robotics and Applications","volume":"249 1","pages":""},"PeriodicalIF":2.0000,"publicationDate":"2024-04-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Intelligent Robotics and Applications","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s41315-024-00337-y","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
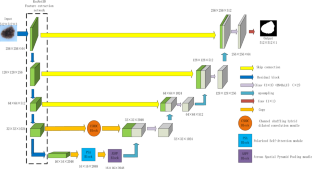
Skin lesion segmentation is an important step to help us in skin cancer diagnosis. However, skin lesions have variable shapes, fuzzy boundaries, and various colors, which bring challenges to the accurate segmentation of skin lesions. In this paper, we propose an Enhanced Deep Information Fusion based on residual U-net (ED-ResUnet). Firstly, the coding part is improved into a residual network structure, and more feature information is obtained by stacking residual blocks. Secondly, a Channel shuffling hybrid dilated convolution module is designed to increase the receptive field, so that the network pays more attention to deep feature information and strengthens the transmission of context information. Then, the context fusion module and Polarized Self-Attention module are introduced into the encoder to suppress interference information and retain effective lesion location information. Finally, the experimental results on the ISIC 2017 dermoscopy image dataset show that the Dice Coefficient of the segmentation results of the proposed algorithm reaches 87.43%, which is 8.81% higher than that of the original U-Net network and 5.7% higher than that of the UNet++ network. It can segment melanoma effectively.
期刊介绍:
The International Journal of Intelligent Robotics and Applications (IJIRA) fosters the dissemination of new discoveries and novel technologies that advance developments in robotics and their broad applications. This journal provides a publication and communication platform for all robotics topics, from the theoretical fundamentals and technological advances to various applications including manufacturing, space vehicles, biomedical systems and automobiles, data-storage devices, healthcare systems, home appliances, and intelligent highways. IJIRA welcomes contributions from researchers, professionals and industrial practitioners. It publishes original, high-quality and previously unpublished research papers, brief reports, and critical reviews. Specific areas of interest include, but are not limited to:Advanced actuators and sensorsCollective and social robots Computing, communication and controlDesign, modeling and prototypingHuman and robot interactionMachine learning and intelligenceMobile robots and intelligent autonomous systemsMulti-sensor fusion and perceptionPlanning, navigation and localizationRobot intelligence, learning and linguisticsRobotic vision, recognition and reconstructionBio-mechatronics and roboticsCloud and Swarm roboticsCognitive and neuro roboticsExploration and security roboticsHealthcare, medical and assistive roboticsRobotics for intelligent manufacturingService, social and entertainment roboticsSpace and underwater robotsNovel and emerging applications

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


