Mohamed A. Hassan, Muhammed Y. Worku, Abdelfattah A. Eladl, Mohamed R. Elkadeem, Md Ismail Hossain, Mohammad A. Abido
{"title":"Instability Mitigation of Constant Power Load in Microgrid","authors":"Mohamed A. Hassan, Muhammed Y. Worku, Abdelfattah A. Eladl, Mohamed R. Elkadeem, Md Ismail Hossain, Mohammad A. Abido","doi":"10.1007/s13369-024-08813-0","DOIUrl":null,"url":null,"abstract":"<p>This paper proposes a novel stabilizing control method aimed at overcoming the instability challenges posed by the negative incremental resistance characteristics of a constant power load (CPL) within an autonomous microgrid (MG). The proposed stabilization technique integrates a power derivative-integral term with conventional droop control, strategically applied to enhance the MG's dynamic stability in the presence of CPL. The considered MG model, encompassing three inverter-based distributed generations (DGs), a constant impedance load (CIL), and CPL, is meticulously developed and simulated using MATLAB environment. Phase Locked Loop (PLL) is employed to synchronize the CPL with MG. The proposed controller is a key highlight, featuring optimally designed and tuned controller parameters for all DGs, CPL, and PLL. Particle Swarm Optimization (PSO) and Genetic Algorithm (GA) are employed to address the challenges linked to the laborious tuning process of controllers. The simulation results, which include scenarios involving three-phase faults and step changes, provide compelling evidence of the proposed controller's superior performance compared to conventional droop scheme. Furthermore, a comparative analysis is conducted to affirm and quantify the enhancements achieved through the proposed modified droop PSO-based MG controller concerning transient response. The results obtained emphasize the effectiveness of the proposed approach in simultaneously minimizing both overshoot and settling time. In comparison with the conventional controller, the proposed controller demonstrates a substantial decrease in percentage overshoot for the active power of DG3 and DC voltage of the CPL, with values of 93.89 and 99.9%, respectively. The corresponding improvements in settling time are notable, showcasing reductions of 83.11% for the active power of DG3 and 66.1% for the DC voltage of the CPL. When compared to the GA-based controller, the proposed controller exhibits significant percentage overshoot reductions for and DC voltage of the CPL, achieving 79.42 and 99.8%, respectively. Additionally, the settling time records noteworthy improvements, with reductions of 76.19% for the active power of DG3 and 57.57% for the DC voltage of the CPL. To further validate the real-world applicability and effectiveness of the proposed method, a real-time digital simulator (RTDS) is employed. The RTDS experiments results confirm the proposed scheme's ability to enhance MG stability, substantiating the simulation findings. This holistic approach, encompassing theoretical modeling, simulation studies, and real-time validation, establishes the proposed stabilizing control method as a promising and effective solution for mitigating instability issues associated with CPL in autonomous MGs.</p>","PeriodicalId":8109,"journal":{"name":"Arabian Journal for Science and Engineering","volume":"50 1","pages":""},"PeriodicalIF":2.9000,"publicationDate":"2024-03-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Arabian Journal for Science and Engineering","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1007/s13369-024-08813-0","RegionNum":4,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"Multidisciplinary","Score":null,"Total":0}
引用次数: 0
Abstract
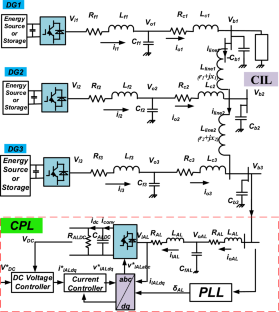
This paper proposes a novel stabilizing control method aimed at overcoming the instability challenges posed by the negative incremental resistance characteristics of a constant power load (CPL) within an autonomous microgrid (MG). The proposed stabilization technique integrates a power derivative-integral term with conventional droop control, strategically applied to enhance the MG's dynamic stability in the presence of CPL. The considered MG model, encompassing three inverter-based distributed generations (DGs), a constant impedance load (CIL), and CPL, is meticulously developed and simulated using MATLAB environment. Phase Locked Loop (PLL) is employed to synchronize the CPL with MG. The proposed controller is a key highlight, featuring optimally designed and tuned controller parameters for all DGs, CPL, and PLL. Particle Swarm Optimization (PSO) and Genetic Algorithm (GA) are employed to address the challenges linked to the laborious tuning process of controllers. The simulation results, which include scenarios involving three-phase faults and step changes, provide compelling evidence of the proposed controller's superior performance compared to conventional droop scheme. Furthermore, a comparative analysis is conducted to affirm and quantify the enhancements achieved through the proposed modified droop PSO-based MG controller concerning transient response. The results obtained emphasize the effectiveness of the proposed approach in simultaneously minimizing both overshoot and settling time. In comparison with the conventional controller, the proposed controller demonstrates a substantial decrease in percentage overshoot for the active power of DG3 and DC voltage of the CPL, with values of 93.89 and 99.9%, respectively. The corresponding improvements in settling time are notable, showcasing reductions of 83.11% for the active power of DG3 and 66.1% for the DC voltage of the CPL. When compared to the GA-based controller, the proposed controller exhibits significant percentage overshoot reductions for and DC voltage of the CPL, achieving 79.42 and 99.8%, respectively. Additionally, the settling time records noteworthy improvements, with reductions of 76.19% for the active power of DG3 and 57.57% for the DC voltage of the CPL. To further validate the real-world applicability and effectiveness of the proposed method, a real-time digital simulator (RTDS) is employed. The RTDS experiments results confirm the proposed scheme's ability to enhance MG stability, substantiating the simulation findings. This holistic approach, encompassing theoretical modeling, simulation studies, and real-time validation, establishes the proposed stabilizing control method as a promising and effective solution for mitigating instability issues associated with CPL in autonomous MGs.
期刊介绍:
King Fahd University of Petroleum & Minerals (KFUPM) partnered with Springer to publish the Arabian Journal for Science and Engineering (AJSE).
AJSE, which has been published by KFUPM since 1975, is a recognized national, regional and international journal that provides a great opportunity for the dissemination of research advances from the Kingdom of Saudi Arabia, MENA and the world.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


