Román Comelli, Sorin Olaru, María M. Seron, Ernesto Kofman
{"title":"Application of a stabilizing model predictive controller to path following for a car‐like agricultural robot","authors":"Román Comelli, Sorin Olaru, María M. Seron, Ernesto Kofman","doi":"10.1002/oca.3126","DOIUrl":null,"url":null,"abstract":"This work addresses the problem of path following for a car‐like agricultural robot by means of a finite control set model predictive control (FCS‐MPC) strategy that considers the control actions in a set composed of a limited amount of elements. Recent results on a stabilizing MPC formulation that replaces the classical control invariant set by a pair of inner‐outer sets are extended to preserve stability properties with different control and prediction horizons and are then used for the aforementioned application. Being particularly simple, the presented approach can explicitly deal with nonlinearities and constraints at the expense of resolution in the vehicle steering system, which in practice does not affect the controller performance as will be shown. In addition to describing the control method, simulations and a comparison with another nonlinear MPC strategy are presented to illustrate the advantages of the proposed scheme.","PeriodicalId":501055,"journal":{"name":"Optimal Control Applications and Methods","volume":"143 1","pages":""},"PeriodicalIF":0.0000,"publicationDate":"2024-03-26","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Optimal Control Applications and Methods","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1002/oca.3126","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 0
Abstract
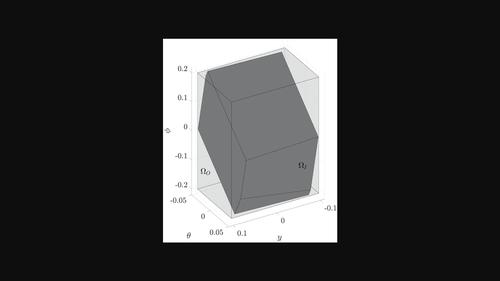
This work addresses the problem of path following for a car‐like agricultural robot by means of a finite control set model predictive control (FCS‐MPC) strategy that considers the control actions in a set composed of a limited amount of elements. Recent results on a stabilizing MPC formulation that replaces the classical control invariant set by a pair of inner‐outer sets are extended to preserve stability properties with different control and prediction horizons and are then used for the aforementioned application. Being particularly simple, the presented approach can explicitly deal with nonlinearities and constraints at the expense of resolution in the vehicle steering system, which in practice does not affect the controller performance as will be shown. In addition to describing the control method, simulations and a comparison with another nonlinear MPC strategy are presented to illustrate the advantages of the proposed scheme.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


