David Bojanić, Kristijan Bartol, Josep Forest, Tomislav Petković, Tomislav Pribanić
{"title":"Addressing the generalization of 3D registration methods with a featureless baseline and an unbiased benchmark","authors":"David Bojanić, Kristijan Bartol, Josep Forest, Tomislav Petković, Tomislav Pribanić","doi":"10.1007/s00138-024-01510-w","DOIUrl":null,"url":null,"abstract":"<p>Recent 3D registration methods are mostly learning-based that either find correspondences in feature space and match them, or directly estimate the registration transformation from the given point cloud features. Therefore, these feature-based methods have difficulties with generalizing onto point clouds that differ substantially from their training data. This issue is not so apparent because of the problematic benchmark definitions that cannot provide any in-depth analysis and contain a bias toward similar data. Therefore, we propose a methodology to create a 3D registration benchmark, given a point cloud dataset, that provides a more informative evaluation of a method w.r.t. other benchmarks. Using this methodology, we create a novel FAUST-partial (FP) benchmark, based on the FAUST dataset, with several difficulty levels. The FP benchmark addresses the limitations of the current benchmarks: lack of data and parameter range variability, and allows to evaluate the strengths and weaknesses of a 3D registration method w.r.t. a single registration parameter. Using the new FP benchmark, we provide a thorough analysis of the current state-of-the-art methods and observe that the current method still struggle to generalize onto severely different out-of-sample data. Therefore, we propose a simple featureless traditional 3D registration baseline method based on the weighted cross-correlation between two given point clouds. Our method achieves strong results on current benchmarking datasets, outperforming most deep learning methods. Our source code is available on github.com/DavidBoja/exhaustive-grid-search.</p>","PeriodicalId":51116,"journal":{"name":"Machine Vision and Applications","volume":"2015 1","pages":""},"PeriodicalIF":2.3000,"publicationDate":"2024-03-23","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Machine Vision and Applications","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s00138-024-01510-w","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
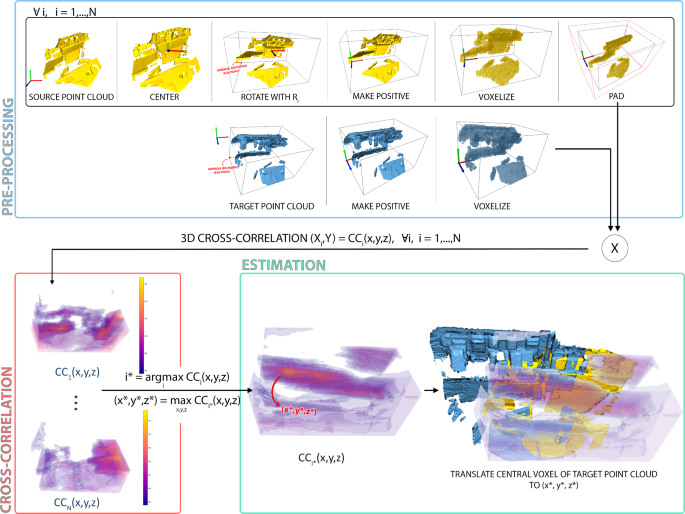
Recent 3D registration methods are mostly learning-based that either find correspondences in feature space and match them, or directly estimate the registration transformation from the given point cloud features. Therefore, these feature-based methods have difficulties with generalizing onto point clouds that differ substantially from their training data. This issue is not so apparent because of the problematic benchmark definitions that cannot provide any in-depth analysis and contain a bias toward similar data. Therefore, we propose a methodology to create a 3D registration benchmark, given a point cloud dataset, that provides a more informative evaluation of a method w.r.t. other benchmarks. Using this methodology, we create a novel FAUST-partial (FP) benchmark, based on the FAUST dataset, with several difficulty levels. The FP benchmark addresses the limitations of the current benchmarks: lack of data and parameter range variability, and allows to evaluate the strengths and weaknesses of a 3D registration method w.r.t. a single registration parameter. Using the new FP benchmark, we provide a thorough analysis of the current state-of-the-art methods and observe that the current method still struggle to generalize onto severely different out-of-sample data. Therefore, we propose a simple featureless traditional 3D registration baseline method based on the weighted cross-correlation between two given point clouds. Our method achieves strong results on current benchmarking datasets, outperforming most deep learning methods. Our source code is available on github.com/DavidBoja/exhaustive-grid-search.
期刊介绍:
Machine Vision and Applications publishes high-quality technical contributions in machine vision research and development. Specifically, the editors encourage submittals in all applications and engineering aspects of image-related computing. In particular, original contributions dealing with scientific, commercial, industrial, military, and biomedical applications of machine vision, are all within the scope of the journal.
Particular emphasis is placed on engineering and technology aspects of image processing and computer vision.
The following aspects of machine vision applications are of interest: algorithms, architectures, VLSI implementations, AI techniques and expert systems for machine vision, front-end sensing, multidimensional and multisensor machine vision, real-time techniques, image databases, virtual reality and visualization. Papers must include a significant experimental validation component.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


