{"title":"Searching for Parameters of a Model with the Best Local Controllability","authors":"M. A. Velishchanskiy, V. N. Chetverikov","doi":"10.1134/s0012266123120145","DOIUrl":null,"url":null,"abstract":"<h3 data-test=\"abstract-sub-heading\">Abstract</h3><p> We study the problem of optimal choice of model parameters with respect to any\nfunctional. Locally controllable affine systems and integral functionals depending on the program\ncontrol are considered. Local controllability of affine systems with nonnegative inputs is proved in\nthe case where the columns multiplying the controls form a positive basis. For such systems, we\nintroduce the local controllability coefficient and pose the problem of its maximization depending\non the choice of model parameters. As an example, we consider a very simplified model of an\nunderwater vehicle and study the problem of finding an arrangement of its control propellers in\nwhich the energy consumption of the vehicle is minimal.\n</p>","PeriodicalId":50580,"journal":{"name":"Differential Equations","volume":"295 1","pages":""},"PeriodicalIF":0.8000,"publicationDate":"2024-02-26","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Differential Equations","FirstCategoryId":"100","ListUrlMain":"https://doi.org/10.1134/s0012266123120145","RegionNum":4,"RegionCategory":"数学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MATHEMATICS","Score":null,"Total":0}
引用次数: 0
Abstract
We study the problem of optimal choice of model parameters with respect to any
functional. Locally controllable affine systems and integral functionals depending on the program
control are considered. Local controllability of affine systems with nonnegative inputs is proved in
the case where the columns multiplying the controls form a positive basis. For such systems, we
introduce the local controllability coefficient and pose the problem of its maximization depending
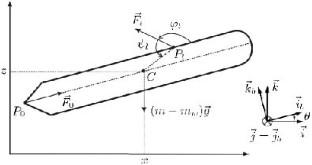
on the choice of model parameters. As an example, we consider a very simplified model of an
underwater vehicle and study the problem of finding an arrangement of its control propellers in
which the energy consumption of the vehicle is minimal.
期刊介绍:
Differential Equations is a journal devoted to differential equations and the associated integral equations. The journal publishes original articles by authors from all countries and accepts manuscripts in English and Russian. The topics of the journal cover ordinary differential equations, partial differential equations, spectral theory of differential operators, integral and integral–differential equations, difference equations and their applications in control theory, mathematical modeling, shell theory, informatics, and oscillation theory. The journal is published in collaboration with the Department of Mathematics and the Division of Nanotechnologies and Information Technologies of the Russian Academy of Sciences and the Institute of Mathematics of the National Academy of Sciences of Belarus.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


