Roelf Postema, Hidde Hardon, A. Masie Rahimi, Roel Horeman, Felix Nickel, Jenny Dankelman, Alexander L. A. Bloemendaal, Maarten van der Elst, Donald L. van der Peet, Freek Daams, Sem F. Hardon, Tim Horeman
{"title":"The value of collision feedback in robotic surgical skills training","authors":"Roelf Postema, Hidde Hardon, A. Masie Rahimi, Roel Horeman, Felix Nickel, Jenny Dankelman, Alexander L. A. Bloemendaal, Maarten van der Elst, Donald L. van der Peet, Freek Daams, Sem F. Hardon, Tim Horeman","doi":"10.1007/s10055-023-00891-z","DOIUrl":null,"url":null,"abstract":"<p>Collision feedback about instrument and environment interaction is often lacking in robotic surgery training devices. The PoLaRS virtual reality simulator is a newly developed desk trainer that overcomes drawbacks of existing robot trainers for advanced laparoscopy. This study aimed to assess the effect of haptic and visual feedback during training on the performance of a robotic surgical task. Robotic surgery-naïve participants were randomized and equally divided into two training groups: Haptic and Visual Feedback (HVF) and No Haptic and Visual Feedback. Participants performed two basic virtual reality training tasks on the PoLaRS system as a pre- and post-test. The measurement parameters Time, Tip-to-tip distance, Path length Left/Right and Collisions Left/Right were used to analyze the learning curves and statistically compare the pre- and post-tests performances. In total, 198 trials performed by 22 participants were included. The visual and haptic feedback did not negatively influence the time to complete the tasks. Although no improvement in skill was observed between pre- and post-tests, the mean rank of the number of collisions of the right grasper (dominant hand) was significantly lower in the HVF feedback group during the second post-test (Mean Rank = 8.73 versus Mean Rank = 14.27, <i>U</i> = 30.00, <i>p</i> = 0.045). Haptic and visual feedback during the training on the PoLaRS system resulted in fewer instrument collisions. These results warrant the introduction of haptic feedback in subjects with no experience in robotic surgery. The PoLaRS system can be utilized to remotely optimize instrument handling before commencing robotic surgery in the operating room.</p>","PeriodicalId":23727,"journal":{"name":"Virtual Reality","volume":"43 1","pages":""},"PeriodicalIF":5.0000,"publicationDate":"2024-02-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Virtual Reality","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s10055-023-00891-z","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS","Score":null,"Total":0}
引用次数: 0
Abstract
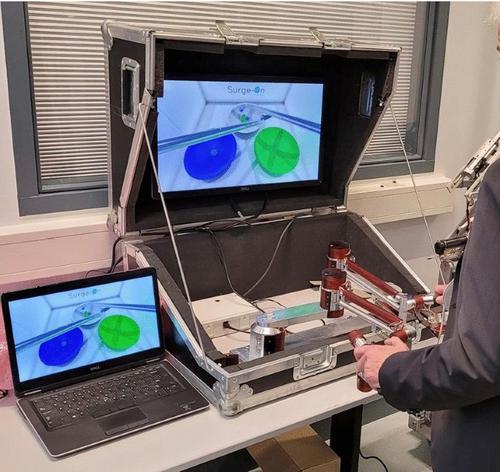
Collision feedback about instrument and environment interaction is often lacking in robotic surgery training devices. The PoLaRS virtual reality simulator is a newly developed desk trainer that overcomes drawbacks of existing robot trainers for advanced laparoscopy. This study aimed to assess the effect of haptic and visual feedback during training on the performance of a robotic surgical task. Robotic surgery-naïve participants were randomized and equally divided into two training groups: Haptic and Visual Feedback (HVF) and No Haptic and Visual Feedback. Participants performed two basic virtual reality training tasks on the PoLaRS system as a pre- and post-test. The measurement parameters Time, Tip-to-tip distance, Path length Left/Right and Collisions Left/Right were used to analyze the learning curves and statistically compare the pre- and post-tests performances. In total, 198 trials performed by 22 participants were included. The visual and haptic feedback did not negatively influence the time to complete the tasks. Although no improvement in skill was observed between pre- and post-tests, the mean rank of the number of collisions of the right grasper (dominant hand) was significantly lower in the HVF feedback group during the second post-test (Mean Rank = 8.73 versus Mean Rank = 14.27, U = 30.00, p = 0.045). Haptic and visual feedback during the training on the PoLaRS system resulted in fewer instrument collisions. These results warrant the introduction of haptic feedback in subjects with no experience in robotic surgery. The PoLaRS system can be utilized to remotely optimize instrument handling before commencing robotic surgery in the operating room.
期刊介绍:
The journal, established in 1995, publishes original research in Virtual Reality, Augmented and Mixed Reality that shapes and informs the community. The multidisciplinary nature of the field means that submissions are welcomed on a wide range of topics including, but not limited to:
Original research studies of Virtual Reality, Augmented Reality, Mixed Reality and real-time visualization applications
Development and evaluation of systems, tools, techniques and software that advance the field, including:
Display technologies, including Head Mounted Displays, simulators and immersive displays
Haptic technologies, including novel devices, interaction and rendering
Interaction management, including gesture control, eye gaze, biosensors and wearables
Tracking technologies
VR/AR/MR in medicine, including training, surgical simulation, rehabilitation, and tissue/organ modelling.
Impactful and original applications and studies of VR/AR/MR’s utility in areas such as manufacturing, business, telecommunications, arts, education, design, entertainment and defence
Research demonstrating new techniques and approaches to designing, building and evaluating virtual and augmented reality systems
Original research studies assessing the social, ethical, data or legal aspects of VR/AR/MR.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


