Jesse Muhojoki , Teemu Hakala , Antero Kukko , Harri Kaartinen , Juha Hyyppä
{"title":"Comparing positioning accuracy of mobile laser scanning systems under a forest canopy","authors":"Jesse Muhojoki , Teemu Hakala , Antero Kukko , Harri Kaartinen , Juha Hyyppä","doi":"10.1016/j.srs.2024.100121","DOIUrl":null,"url":null,"abstract":"<div><p>In this paper, we compare the positioning accuracy of commercial, mobile laser scanning systems operating under a forest canopy. The accuracy was evaluated on a 800-m-long positioning track, using tree locations from both a traditional field reference, collected with total station, and a high-density airborne laser scanning (ALS) system as a reference. Tree locations were used since mobile lasers are studied for automation of field reference for forest inventory and location of individual trees with high accuracy is required. We also developed a novel method for evaluating the ground level around the trees, as it not only affects the <em>z</em>-coordinate, but the horizontal position as well if the tree is tilted.</p><p>In addition to the accuracy that could only be evaluated for systems equipped with a GNSS receiver, we evaluate the consistency of laser scanning systems by registering the tree locations extracted from the mobile systems to both the field reference and ALS. We demonstrated that the high-density ALS has similar accuracy (RMSE of approximately 6 cm) and precision as the total station field reference, while being much faster to collect. Furthermore, the completeness of the high-density ALS was over 80 %, which is more than enough to register the other methods to it in a robust manner, providing a global position for laser scanners without an inherit way of georeferencing themselves, such as a GNSS receiver.</p><p>The positioning of all the mobile systems were based on the Simultaneous Localization and Mapping (SLAM) algorithm integrated with an inertial measurement unit (IMU), and they showed a similar precision; planar positioning error of less than 15 cm and vertical error of 10–30 cm. However, the accuracy of the only commercial system in this test whose positioning methods included a GNSS receiver, was order of several meters, indicating a demand for better methods for GNSS-based global positioning inside a dense forest canopy.</p></div>","PeriodicalId":101147,"journal":{"name":"Science of Remote Sensing","volume":"9 ","pages":"Article 100121"},"PeriodicalIF":5.7000,"publicationDate":"2024-02-11","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2666017224000051/pdfft?md5=f4b5bcf5ea7c41acc399a4c44629f862&pid=1-s2.0-S2666017224000051-main.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Science of Remote Sensing","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2666017224000051","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENVIRONMENTAL SCIENCES","Score":null,"Total":0}
引用次数: 0
Abstract
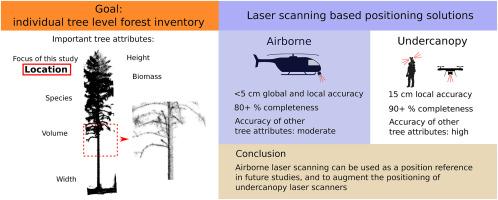
In this paper, we compare the positioning accuracy of commercial, mobile laser scanning systems operating under a forest canopy. The accuracy was evaluated on a 800-m-long positioning track, using tree locations from both a traditional field reference, collected with total station, and a high-density airborne laser scanning (ALS) system as a reference. Tree locations were used since mobile lasers are studied for automation of field reference for forest inventory and location of individual trees with high accuracy is required. We also developed a novel method for evaluating the ground level around the trees, as it not only affects the z-coordinate, but the horizontal position as well if the tree is tilted.
In addition to the accuracy that could only be evaluated for systems equipped with a GNSS receiver, we evaluate the consistency of laser scanning systems by registering the tree locations extracted from the mobile systems to both the field reference and ALS. We demonstrated that the high-density ALS has similar accuracy (RMSE of approximately 6 cm) and precision as the total station field reference, while being much faster to collect. Furthermore, the completeness of the high-density ALS was over 80 %, which is more than enough to register the other methods to it in a robust manner, providing a global position for laser scanners without an inherit way of georeferencing themselves, such as a GNSS receiver.
The positioning of all the mobile systems were based on the Simultaneous Localization and Mapping (SLAM) algorithm integrated with an inertial measurement unit (IMU), and they showed a similar precision; planar positioning error of less than 15 cm and vertical error of 10–30 cm. However, the accuracy of the only commercial system in this test whose positioning methods included a GNSS receiver, was order of several meters, indicating a demand for better methods for GNSS-based global positioning inside a dense forest canopy.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


