Autonomous-rail rapid transit tram: System architecture, design and applications
IF 16.4
引用次数: 0
Abstract
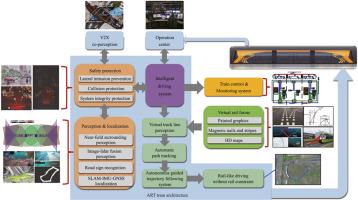
Autonomous-rail Rapid Transit (ART) tram is a new type of multiple-articulated rubber-tire transit that utilizes intelligent perception, path tracking, and trajectory following control technologies to eliminate reliance on physical railway tracks. The adoption of power batteries, hydrogen energy, wheel-edge motor drive, and other technologies has comprehensively realized the dual advantages of large-capacity rail transportation, which is punctual, high volume, energy-saving, and environmentally friendly, as well as the flexibility and low comprehensive cost of traditional bus operations. This has created a brand-new urban rail transit model. This article first introduces the ART tram systems architecture, operating principles, applicable scenarios. Secondly, it introduces the core subsystems of ART tram vehicle structure, electrical system, and energy storage system. Thirdly, it focuses on analyzing the structure composition and control principles of the Automatic All-Wheel Steering System, which includes two key core subsystems: path tracking control subsystems and trajectory following control subsystems. Then, a horizontal comparison is made between the performance advantages and disadvantages of ART and other transportation systems, and the application status of ART tram is summarized. Finally, some common issues related to the development of ART tram are discussed, and a development plan for future ART systems is proposed to better integrate ART tram into urban transportation and meet people's demands for intelligent, comfortable, fast, and environmentally friendly urban public transportation.
自主轨道快速有轨电车:系统架构、设计和应用
自主轨道有轨电车(ART)是一种利用智能感知、路径跟踪、轨迹跟随等控制技术,摆脱对物理轨道依赖的新型多关节橡胶轮胎轨道交通。采用动力电池、氢能源、轮边电机驱动等技术,全面实现了大容量轨道交通准时、大运量、节能、环保和传统公交运营灵活、综合成本低的双重优势。这开创了一种全新的城市轨道交通模式。本文首先介绍了 ART 有轨电车系统的架构、运行原理和适用场景。其次,介绍了 ART 有轨电车的车辆结构、电气系统、储能系统等核心子系统。第三,重点分析了自动全轮转向系统的结构组成和控制原理,其中包括两个关键的核心子系统:路径跟踪控制子系统和轨迹跟踪控制子系统。然后,横向比较了 ART 与其他交通系统的性能优劣,并总结了 ART 有轨电车的应用现状。最后,讨论了与 ART 电车发展相关的一些共性问题,并提出了未来 ART 系统的发展规划,以更好地将 ART 电车融入城市交通,满足人们对智能、舒适、快捷、环保的城市公共交通的需求。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


