Rapid and Reversible Morphing to Enable Multifunctionality in Robots
引用次数: 0
Abstract
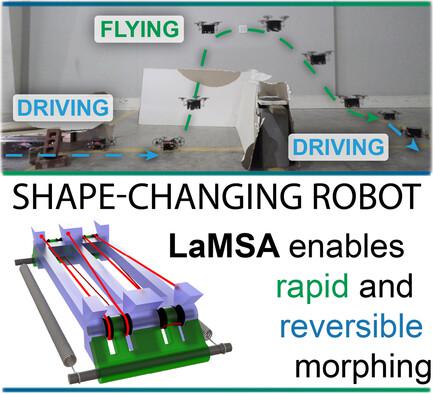
Biological organisms are extraordinary in their ability to change physical form to perform different functions. Mimicking these capabilities in engineered systems has the potential to create multifunctional robots that adapt form and function on-demand for search and rescue, environmental monitoring, and transportation. Organisms are able to navigate such unstructured environments with the ability to rapidly change shape, move swiftly in multiple locomotion modes, and do this efficiently and reversibly without external power sources, feats which are difficult for robots. Herein, a bio-inspired latch-mediated, spring-actuated (LaMSA) morphing mechanism is harnessed to near-instantaneously and reversibly reconfigure a multifunctional robot to achieve driving and flying configurations. This shape change coupled with a combined propeller/wheel leverages the same motors and electronics for both flying and driving, providing efficiency of morphing and locomotion for completely untethered operation. The adaptive robotic vehicle can move through confined spaces and rough terrain which are difficult to pass by driving or flying alone, and expands the potential range through power savings in the driving mode. This work provides a powerful scheme for LaMSA in robots, in which controlled, small-scale LaMSA systems can be integrated as individual components to robots of all sizes to enable new functionalities and enhance performance.
快速可逆变形实现机器人的多功能性
生物有机体具有非凡的能力,能够改变物理形态以执行不同的功能。在工程系统中模仿这些能力有可能创造出多功能机器人,按需调整外形和功能,用于搜救、环境监测和运输。生物能够快速改变形状,以多种运动模式快速移动,并在没有外部动力源的情况下高效、可逆地完成这些任务,从而在这种非结构化环境中游刃有余。在这里,我们利用生物启发的闩式弹簧驱动(LaMSA)变形机制,对多功能机器人进行近乎瞬时和可逆的重新配置,以实现驾驶和飞行配置。这种形状变化与螺旋桨/轮子相结合,利用相同的电机和电子设备实现飞行和驾驶,为完全无绳操作提供了高效的变形和运动能力。这种自适应机器人飞行器可以通过单独驾驶或飞行难以通过的狭窄空间和崎岖地形,并通过在驾驶模式下节省电力来扩大潜在的续航能力。这项工作为机器人中的 LaMSA 提供了一个强大的方案,其中受控的小规模 LaMSA 系统可作为单独组件集成到各种规模的机器人中,从而实现新的功能并提高性能。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


