{"title":"Design consideration on integration of mechanical intravascular ultrasound and electromagnetic tracking sensor for intravascular reconstruction.","authors":"Wenran Cai, Kazuaki Hara, Naoki Tomii, Etsuko Kobayashi, Takashi Ohya, Ichiro Sakuma","doi":"10.1007/s11548-024-03059-5","DOIUrl":null,"url":null,"abstract":"<p><strong>Purpose: </strong>Considering vessel deformation, endovascular navigation requires intraoperative geometric information. Mechanical intravascular ultrasound (IVUS) with an electromagnetic (EM) sensor can be used to reconstruct blood vessels with thin diameter. However, the integration design should be evaluated based on the factors affecting the reconstruction error.</p><p><strong>Methods: </strong>The interference between the mechanical IVUS and EM sensor was measured in different relative positions. Two designs of the integrated catheter were evaluated by measuring the reconstruction errors using a rigid vascular phantom.</p><p><strong>Results: </strong>When the distance from the EM sensor to the field generator was 75 mm, the interference from mechanical IVUS to an EM sensor was negligible, with position and rotation errors less than 0.1 mm and 0.6°, respectively. The reconstructed vessel model for proximal IVUS transducer had a smooth surface but an inaccurate shape at large curvature of the vascular phantom. When the distance to the field generator was 175 mm, the error increased significantly.</p><p><strong>Conclusion: </strong>Placing the IVUS transducer on the proximal side of the EM sensor is superior in terms of interference reduction but inferior in terms of mechanical stability compared to a distal transducer. The distal side is preferred due to better mechanical stability during catheter manipulation at larger curvature. With this configuration, surface reconstruction errors less than 1.7 mm (with RMS 0.57 mm) were achieved when the distance to the field generator was less than 175 mm.</p>","PeriodicalId":51251,"journal":{"name":"International Journal of Computer Assisted Radiology and Surgery","volume":" ","pages":"1545-1554"},"PeriodicalIF":2.3000,"publicationDate":"2024-08-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC11585504/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Computer Assisted Radiology and Surgery","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s11548-024-03059-5","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/1/18 0:00:00","PubModel":"Epub","JCR":"Q3","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
Purpose: Considering vessel deformation, endovascular navigation requires intraoperative geometric information. Mechanical intravascular ultrasound (IVUS) with an electromagnetic (EM) sensor can be used to reconstruct blood vessels with thin diameter. However, the integration design should be evaluated based on the factors affecting the reconstruction error.
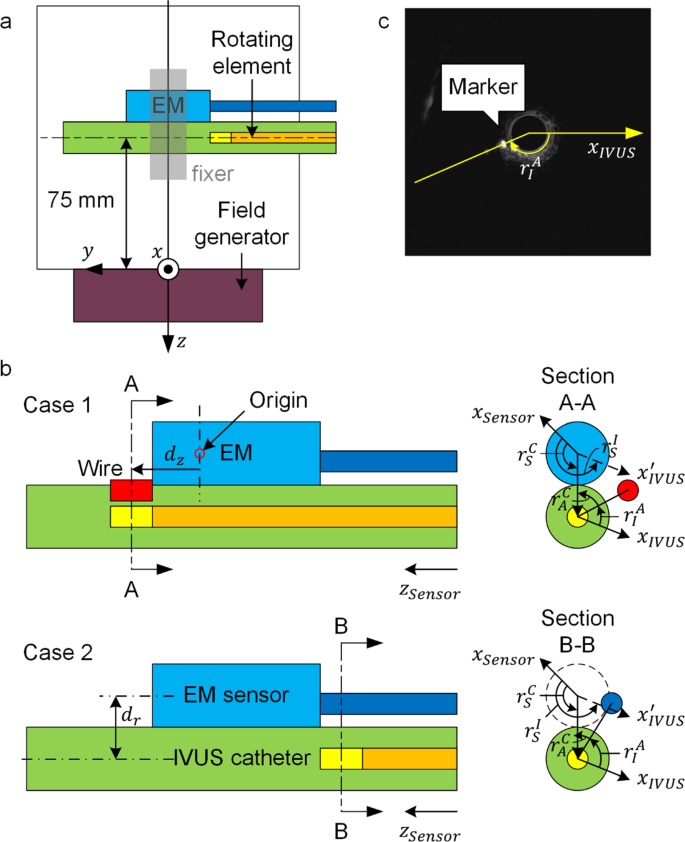
Methods: The interference between the mechanical IVUS and EM sensor was measured in different relative positions. Two designs of the integrated catheter were evaluated by measuring the reconstruction errors using a rigid vascular phantom.
Results: When the distance from the EM sensor to the field generator was 75 mm, the interference from mechanical IVUS to an EM sensor was negligible, with position and rotation errors less than 0.1 mm and 0.6°, respectively. The reconstructed vessel model for proximal IVUS transducer had a smooth surface but an inaccurate shape at large curvature of the vascular phantom. When the distance to the field generator was 175 mm, the error increased significantly.
Conclusion: Placing the IVUS transducer on the proximal side of the EM sensor is superior in terms of interference reduction but inferior in terms of mechanical stability compared to a distal transducer. The distal side is preferred due to better mechanical stability during catheter manipulation at larger curvature. With this configuration, surface reconstruction errors less than 1.7 mm (with RMS 0.57 mm) were achieved when the distance to the field generator was less than 175 mm.
期刊介绍:
The International Journal for Computer Assisted Radiology and Surgery (IJCARS) is a peer-reviewed journal that provides a platform for closing the gap between medical and technical disciplines, and encourages interdisciplinary research and development activities in an international environment.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


