Sandro-Michael Heining, Vladislav Raykov, Oliver Wolff, Hatem Alkadhi, Hans-Christoph Pape, Guido A Wanner
{"title":"Augmented reality-based surgical navigation of pelvic screw placement: an ex-vivo experimental feasibility study.","authors":"Sandro-Michael Heining, Vladislav Raykov, Oliver Wolff, Hatem Alkadhi, Hans-Christoph Pape, Guido A Wanner","doi":"10.1186/s13037-023-00385-6","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>Minimally invasive surgical treatment of pelvic trauma requires a significant level of surgical training and technical expertise. Novel imaging and navigation technologies have always driven surgical technique, and with head-mounted displays being commercially available nowadays, the assessment of such Augmented Reality (AR) devices in a specific surgical setting is appropriate.</p><p><strong>Methods: </strong>In this ex-vivo feasibility study, an AR-based surgical navigation system was assessed in a specific clinical scenario with standard pelvic and acetabular screw pathways. The system has the following components: an optical-see-through Head Mounted Display, a specifically designed modular AR software, and surgical tool tracking using pose estimation with synthetic square markers.</p><p><strong>Results: </strong>The success rate for entry point navigation was 93.8%, the overall translational deviation of drill pathways was 3.99 ± 1.77 mm, and the overall rotational deviation of drill pathways was 4.3 ± 1.8°. There was no relevant theoretic screw perforation, as shown by 88.7% Grade 0-1 and 100% Grade 0-2 rating in our pelvic screw perforation score. Regarding screw length, 103 ± 8% of the planned pathway length could be realized successfully.</p><p><strong>Conclusion: </strong>The novel innovative system assessed in this experimental study provided proof-of-concept for the feasibility of percutaneous screw placement in the pelvis and, thus, could easily be adapted to a specific clinical scenario. The system showed comparable performance with other computer-aided solutions while providing specific advantages such as true 3D vision without intraoperative radiation; however, it needs further improvement and must still undergo regulatory body approval. Future endeavors include intraoperative registration and optimized tool tracking.</p>","PeriodicalId":46782,"journal":{"name":"Patient Safety in Surgery","volume":"18 1","pages":"3"},"PeriodicalIF":2.1000,"publicationDate":"2024-01-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10790465/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Patient Safety in Surgery","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1186/s13037-023-00385-6","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"SURGERY","Score":null,"Total":0}
引用次数: 0
Abstract
Background: Minimally invasive surgical treatment of pelvic trauma requires a significant level of surgical training and technical expertise. Novel imaging and navigation technologies have always driven surgical technique, and with head-mounted displays being commercially available nowadays, the assessment of such Augmented Reality (AR) devices in a specific surgical setting is appropriate.
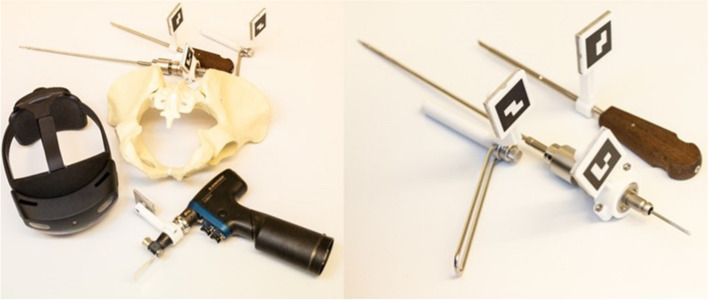
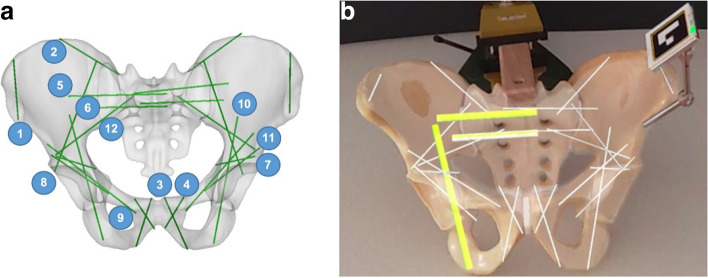
Methods: In this ex-vivo feasibility study, an AR-based surgical navigation system was assessed in a specific clinical scenario with standard pelvic and acetabular screw pathways. The system has the following components: an optical-see-through Head Mounted Display, a specifically designed modular AR software, and surgical tool tracking using pose estimation with synthetic square markers.
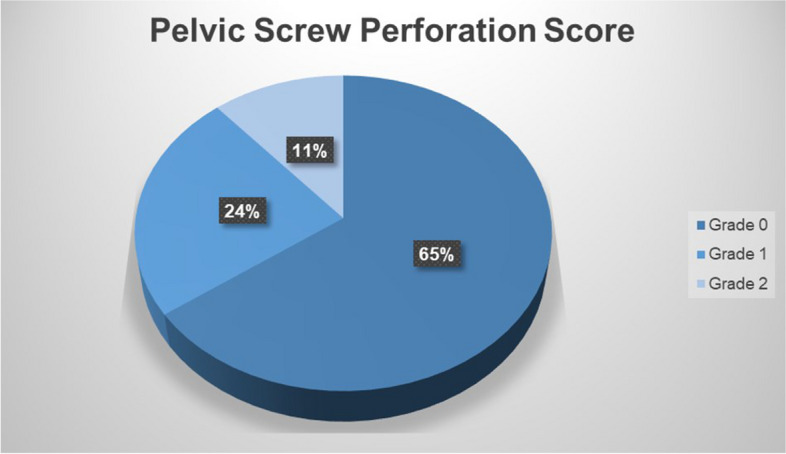
Results: The success rate for entry point navigation was 93.8%, the overall translational deviation of drill pathways was 3.99 ± 1.77 mm, and the overall rotational deviation of drill pathways was 4.3 ± 1.8°. There was no relevant theoretic screw perforation, as shown by 88.7% Grade 0-1 and 100% Grade 0-2 rating in our pelvic screw perforation score. Regarding screw length, 103 ± 8% of the planned pathway length could be realized successfully.
Conclusion: The novel innovative system assessed in this experimental study provided proof-of-concept for the feasibility of percutaneous screw placement in the pelvis and, thus, could easily be adapted to a specific clinical scenario. The system showed comparable performance with other computer-aided solutions while providing specific advantages such as true 3D vision without intraoperative radiation; however, it needs further improvement and must still undergo regulatory body approval. Future endeavors include intraoperative registration and optimized tool tracking.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


