{"title":"Q-EANet: Implicit social modeling for trajectory prediction via experience-anchored queries","authors":"Jiuyu Chen, Zhongli Wang, Jian Wang, Baigen Cai","doi":"10.1049/itr2.12477","DOIUrl":null,"url":null,"abstract":"<p>Accurately predicting the future trajectory and behavior of traffic participants is crucial for the maneuvers of self-driving vehicles. Many existing works employed a learning-based “encoder-interactor-decoder” structure, but they often fail to clearly articulate the relationship between module selections and real-world interactions. As a result, these approaches tend to rely on a simplistic stacking of attention modules. To address this issue, a trajectory prediction network (Q-EANet) is presented in this study, which integrates GRU encoders, MLPs and attention modules. By introducing a new explanatory rule, it makes a contribution to interpretable modeling, models the entire trajectory prediction process via an implicit social modeling formula. Inspired by the anchoring effect in decision psychology, the prediction task is formulated as an information query process that occurs before traffic participants make decisions. Specifically, Q-EANet uses GRUs to encode features and utilizes attention modules to aggregates interaction information for generating the target trajectory anchors. Then, queries are introduced for further interaction. These queries, along with the trajectory anchors with added Gaussian noise, are then processed by a GRU-based decoder. The final prediction results are obtained through a Laplace MDN. Experimental results on the several benchmarks demonstrate the effectiveness of Q-EANet in trajectory prediction tasks. Compared to the existing works, the proposed method achieves state-of-the-art performance with only simple module design. The code for this work is publicly available at https://github.com/Jctrp/socialea.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":"18 6","pages":"1004-1015"},"PeriodicalIF":2.3000,"publicationDate":"2023-12-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12477","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12477","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
Abstract
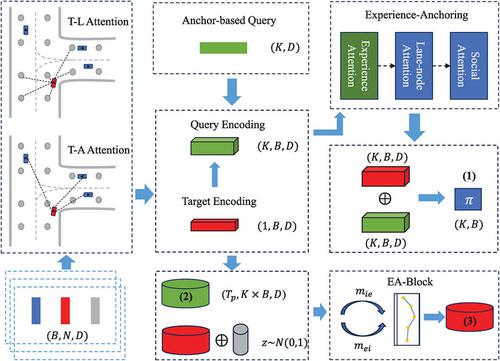
Accurately predicting the future trajectory and behavior of traffic participants is crucial for the maneuvers of self-driving vehicles. Many existing works employed a learning-based “encoder-interactor-decoder” structure, but they often fail to clearly articulate the relationship between module selections and real-world interactions. As a result, these approaches tend to rely on a simplistic stacking of attention modules. To address this issue, a trajectory prediction network (Q-EANet) is presented in this study, which integrates GRU encoders, MLPs and attention modules. By introducing a new explanatory rule, it makes a contribution to interpretable modeling, models the entire trajectory prediction process via an implicit social modeling formula. Inspired by the anchoring effect in decision psychology, the prediction task is formulated as an information query process that occurs before traffic participants make decisions. Specifically, Q-EANet uses GRUs to encode features and utilizes attention modules to aggregates interaction information for generating the target trajectory anchors. Then, queries are introduced for further interaction. These queries, along with the trajectory anchors with added Gaussian noise, are then processed by a GRU-based decoder. The final prediction results are obtained through a Laplace MDN. Experimental results on the several benchmarks demonstrate the effectiveness of Q-EANet in trajectory prediction tasks. Compared to the existing works, the proposed method achieves state-of-the-art performance with only simple module design. The code for this work is publicly available at https://github.com/Jctrp/socialea.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


