{"title":"Heterogeneous group path planning algorithm based on data and mechanism model","authors":"Chaochao Li, Qiong Wu","doi":"10.1002/cav.2220","DOIUrl":null,"url":null,"abstract":"<p>It is a challenging task to find a feasible path from the start to the end for heterogeneous group and avoid collision between dynamic agents and static obstacles. The existing methods are usually applicable to static simple scenes or the type of scenes including a single kind of agents, and it is difficult to meet the high dynamic heterogeneous group movements. To address the above issues, we propose a hybrid driven heterogeneous group path planning method based on data and mechanism model. Data and mechanism model are combined to drive movements of heterogeneous groups. The experimental results show that our method can describe movements of heterogeneous groups more realistically and solve the collision avoidance of heterogeneous groups well. We quantitatively evaluate our method using metrics such as the number of inflection points and the average turning angle. Average turning angle has decreased by 59.50% on average over prior methods. Number of inflection points has decreased by 69.19% on average over prior methods.</p>","PeriodicalId":50645,"journal":{"name":"Computer Animation and Virtual Worlds","volume":"35 1","pages":""},"PeriodicalIF":0.9000,"publicationDate":"2023-09-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Computer Animation and Virtual Worlds","FirstCategoryId":"94","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1002/cav.2220","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"COMPUTER SCIENCE, SOFTWARE ENGINEERING","Score":null,"Total":0}
引用次数: 0
Abstract
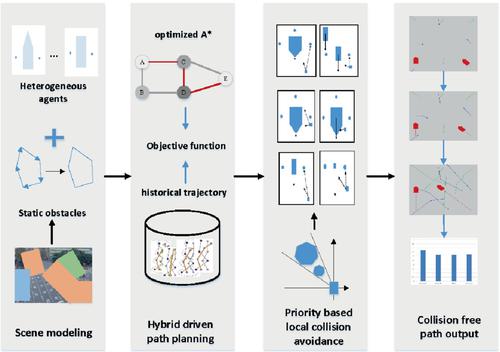
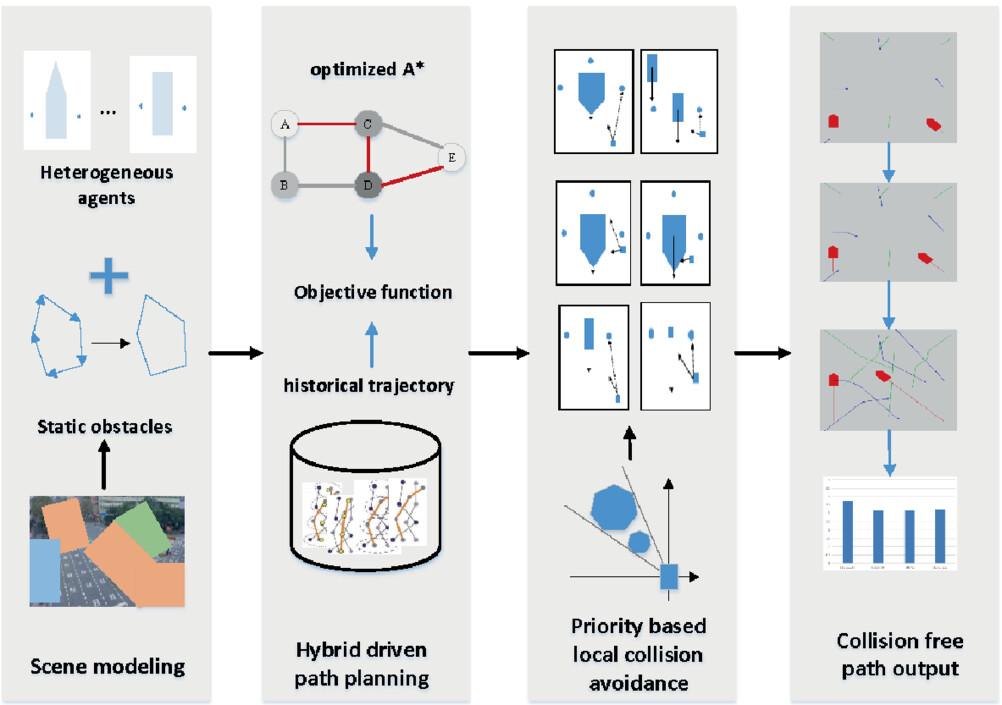
It is a challenging task to find a feasible path from the start to the end for heterogeneous group and avoid collision between dynamic agents and static obstacles. The existing methods are usually applicable to static simple scenes or the type of scenes including a single kind of agents, and it is difficult to meet the high dynamic heterogeneous group movements. To address the above issues, we propose a hybrid driven heterogeneous group path planning method based on data and mechanism model. Data and mechanism model are combined to drive movements of heterogeneous groups. The experimental results show that our method can describe movements of heterogeneous groups more realistically and solve the collision avoidance of heterogeneous groups well. We quantitatively evaluate our method using metrics such as the number of inflection points and the average turning angle. Average turning angle has decreased by 59.50% on average over prior methods. Number of inflection points has decreased by 69.19% on average over prior methods.
期刊介绍:
With the advent of very powerful PCs and high-end graphics cards, there has been an incredible development in Virtual Worlds, real-time computer animation and simulation, games. But at the same time, new and cheaper Virtual Reality devices have appeared allowing an interaction with these real-time Virtual Worlds and even with real worlds through Augmented Reality. Three-dimensional characters, especially Virtual Humans are now of an exceptional quality, which allows to use them in the movie industry. But this is only a beginning, as with the development of Artificial Intelligence and Agent technology, these characters will become more and more autonomous and even intelligent. They will inhabit the Virtual Worlds in a Virtual Life together with animals and plants.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


