Design, Implementation, and Evaluation of an External Pose-Tracking System for Underwater Cameras
IF 3.3
4区 地球科学
Q3 IMAGING SCIENCE & PHOTOGRAPHIC TECHNOLOGY
PFG-Journal of Photogrammetry Remote Sensing and Geoinformation Science
Pub Date : 2023-10-16
DOI:10.1007/s41064-023-00263-x
引用次数: 0
Abstract
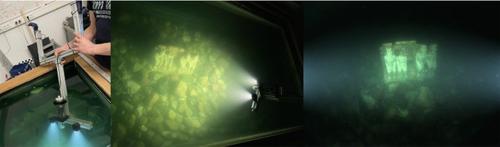
Abstract To advance underwater computer vision and robotics from lab environments and clear water scenarios to the deep dark ocean or murky coastal waters, representative benchmarks and realistic datasets with ground truth information are required. In particular, determining the camera pose is essential for many underwater robotic or photogrammetric applications and known ground truth is mandatory to evaluate the performance of, e.g., simultaneous localization and mapping approaches in such extreme environments. This paper presents the conception, calibration, and implementation of an external reference system for determining the underwater camera pose in real time. The approach, based on an HTC Vive tracking system in air, calculates the underwater camera pose by fusing the poses of two controllers tracked above the water surface of a tank. It is shown that the mean deviation of this approach to an optical marker-based reference in air is less than 3 mm and 0.3 $$^{\circ }$$
水下相机外部姿态跟踪系统的设计、实现和评估
为了将水下计算机视觉和机器人技术从实验室环境和清澈的水场景推进到深海或阴暗的沿海水域,需要具有代表性的基准和具有地面真实信息的真实数据集。特别是,确定相机姿势对于许多水下机器人或摄影测量应用至关重要,并且已知的地面真相对于评估性能是强制性的,例如,在这种极端环境中同时定位和绘图方法。本文介绍了一种用于实时确定水下摄像机姿态的外部参考系统的概念、标定和实现。这种方法基于HTC Vive在空中的跟踪系统,通过融合在水箱水面上跟踪的两个控制器的姿势来计算水下摄像机的姿势。结果表明,这种方法与空气中基于光学标记的参考值的平均偏差小于3毫米和0.3 $$^{\circ }$$°。最后,验证了该系统在水下应用的可用性。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

PFG-Journal of Photogrammetry Remote Sensing and Geoinformation Science
Physics and Astronomy-Instrumentation
CiteScore
8.20
自引率
2.40%
发文量
38
期刊介绍:
PFG is an international scholarly journal covering the progress and application of photogrammetric methods, remote sensing technology and the interconnected field of geoinformation science. It places special editorial emphasis on the communication of new methodologies in data acquisition and new approaches to optimized processing and interpretation of all types of data which were acquired by photogrammetric methods, remote sensing, image processing and the computer-aided interpretation of such data in general. The journal hence addresses both researchers and students of these disciplines at academic institutions and universities as well as the downstream users in both the private sector and public administration.
Founded in 1926 under the former name Bildmessung und Luftbildwesen, PFG is worldwide the oldest journal on photogrammetry. It is the official journal of the German Society for Photogrammetry, Remote Sensing and Geoinformation (DGPF).
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


